第1、2章平面机构的自由度和速度分析1
机器:通常将能够实现确定的机械运动,又能做有用功的机械功或实现能量、物料、信息的传递与变换的装置称为机器
机构:只能实现运动和力的传递与变换的装置称为机器
机械:机器和机构统称为机械
零件:机器中每一个独立制造的单元体称为零件
构件:机器中每一个独立运动的单元体称为构件
通用零件:各种机械中普遍使用的零件称为通用零件,如螺钉、轴、轴承等
专用零件:在某一类型机械中使用的零件称为专用零件,如内燃机活塞、曲轴、汽轮机的叶片等
平面机构:所有构件都在同一个平面或平行平面内运动的机构称为平面机构
机构运动简图:说明机构各构件间相对运动关系的简化图形称为机构运动简图
用途:为了使问题简化,胡洛那些与运动无关的构件的外形和运动副的具体构造,禁用简单线条和符号来表示构件和运动副,并按比例定出各运动副的位置
运动副有哪些类型
各引入几个约束
用什么符号表示
答:运动副:这种使两构件直接接触并能产生一定相对运动的连接称为运动副
转动副低副:两构件以面接触平面运动副(引入两个约束)移动副高副:两构件以点或线的形式接触运动副的类型(引入一个约束)空间运动副符号表示见课本P65
构件的组成:固定构件(机架)、原动件(主动件)、从动件8
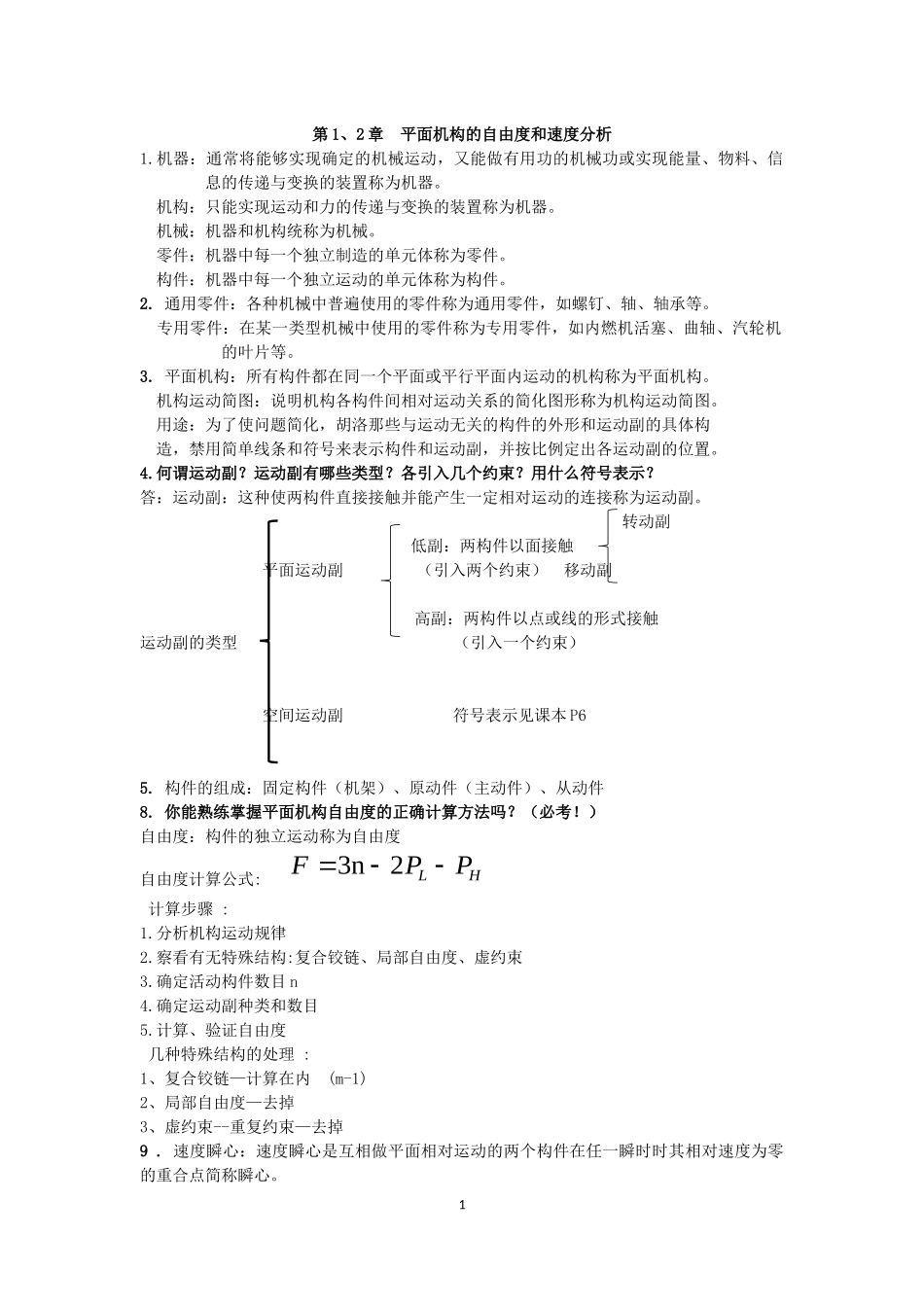
你能熟练掌握平面机构自由度的正确计算方法吗
)自由度:构件的独立运动称为自由度自由度计算公式:HLPPF2n3计算步骤:1
分析机构运动规律2
察看有无特殊结构:复合铰链、局部自由度、虚约束3
确定活动构件数目n4
确定运动副种类和数目5
计算、验证自由度几种特殊结构的处理:1、复合铰链—计算在内(m-1)2、局部自由度—去掉3、虚约束--重复约束—去掉9
速度瞬心:速度瞬心是互相做平面相对运动的两个构件在任一瞬时时其相对速度为零的重合点简称瞬心
1相对瞬心:如果两构件均在运动,则瞬心的绝