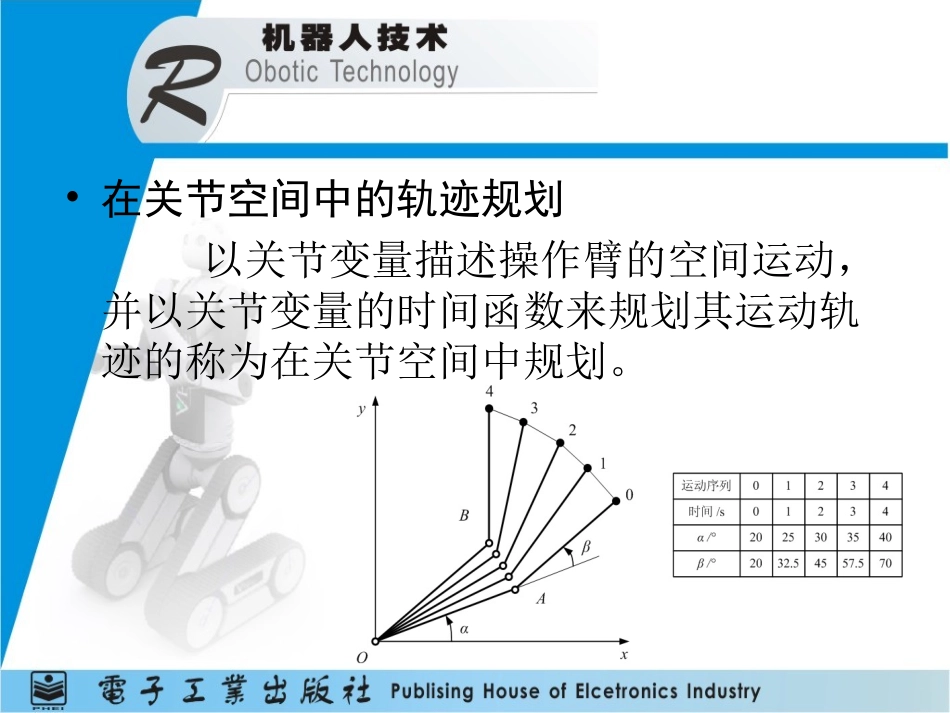
轨迹规划•轨迹:末端执行器空间运动的位姿、速度和加速度的时间历程•轨迹规划的任务:根据机器人的作业要求,构造出各关节运动的时间历程,以保证末端执行器实现所期望的空间运动第一节概述•在关节空间中的轨迹规划以关节变量描述操作臂的空间运动,并以关节变量的时间函数来规划其运动轨迹的称为在关节空间中规划
•在直角坐标空间中的轨迹规划以末端执行器在直角坐标系中的位姿、速度和加速度描述其空间运动,并以此规划机器人运动的称为在直角坐标空间中规划
第二节在关节空间的轨迹规划•以三次多项式规划以三次多项式作为关节在两个位置间的平滑过渡函数约束条件:关节在初始、终了位置处的位置、速度轨迹特点:位置曲线为三次曲线,速度为抛物线,加速度为直线•例5
1设机器人执行一次作业任务时,某关节历时3秒从起始位置θ0=9º运动到终了位置θf=60º,该关节在起、终点的关节速度均为0,试用三次多项式规划该关节的运动
•以五次多项式规划以五次多项式作为关节在两个位置间的平滑过渡函数约束条件:关节在初始、终了位置处的位置、速度和加速度特点:位置曲线为五次曲线,引入加速度约束,有利于机构平稳运行•带抛物线过渡的线性规划以带抛物线过渡的线性函数作为关节在两个位置间的平滑过渡特点:先加速、再匀速、后减速运行•例5
2设某关节在5秒钟的时间内要从起始位置θ0=15º运动到终了位置θf=75º,试用带抛物线过渡的线性轨迹规划其运动
•过中间点的轨迹规划•过中间点的三次多项式规划•过中间点的带抛物线过渡的规划第三节在直角空间的轨迹规划•目的将描述位姿的直角坐标变量表示成时间的函数•确定关节变量值的流程1)给时间一个增量Δt,得到考察时刻t=t+Δt;2)利用规划函数计算手部的位姿变量值;3)利用逆运动学方程计算与此对应的关节变量值;4)将此关节信息传送给控制器实现对操作臂控制;