《数字式传感器》教学案【教学目的:】1、掌握几种典型数字式传感器的组成和种类;2、理解并掌握几种典型数字式传感器的工作原理;【重点难点:】数字式传感器的工作原理【导入:】1、模拟信号:模拟信号是一种不仅在时间上连续、数值上也连续的物理量,具有无穷多的数值
2、数字信号:数字信号在时间上和数值上均是离散的,而离散信号的值只有真或假,是与不是,因此可以使用二进制数中的0和1来表示
3、数字式传感器:将被测量(一般是位移量)转化为数字信号,并进行精确检测和控制的传感器
4、与之前学习的位移传感器比较,数字式传感器测量范围较大
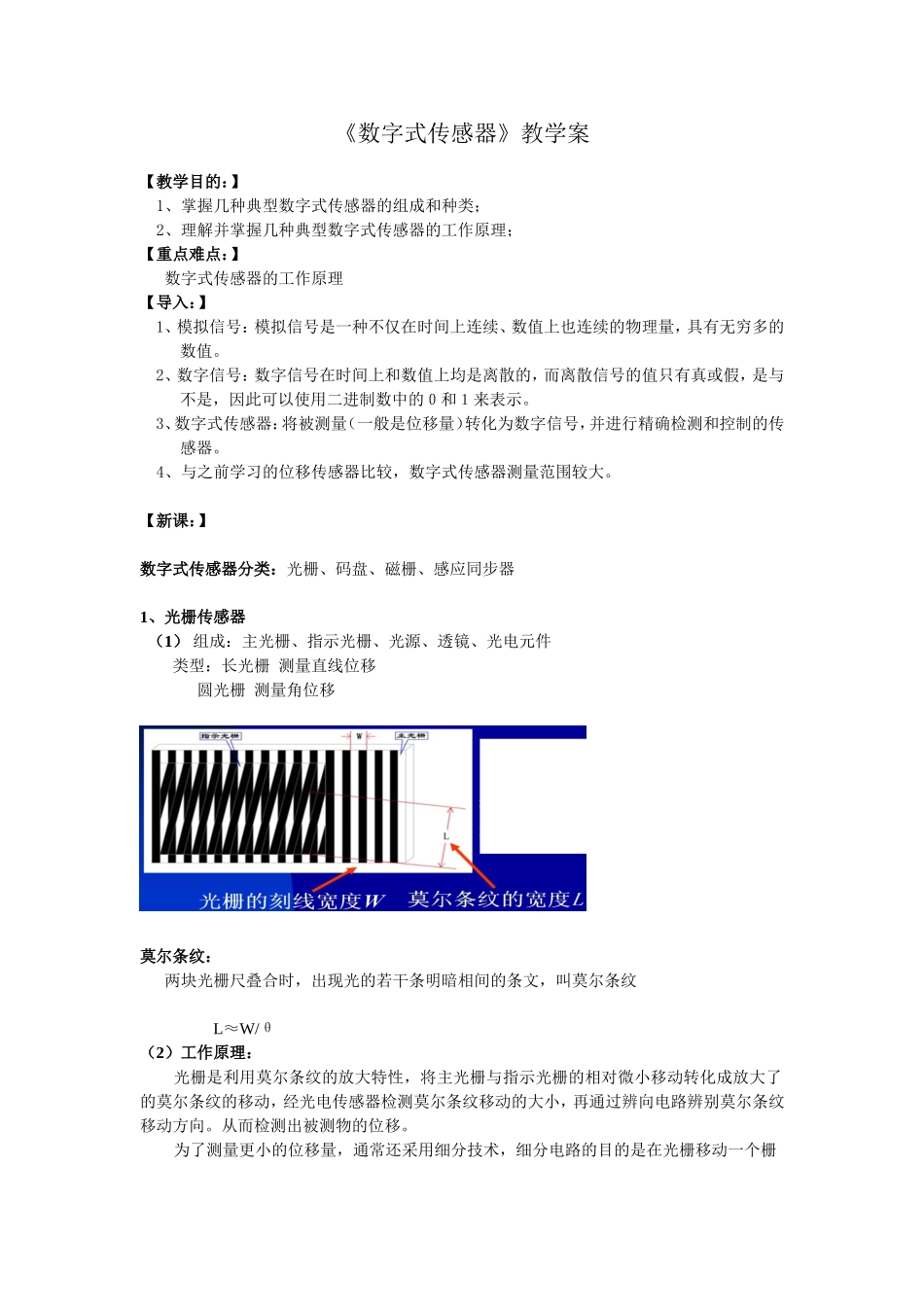
【新课:】数字式传感器分类:光栅、码盘、磁栅、感应同步器1、光栅传感器(1)组成:主光栅、指示光栅、光源、透镜、光电元件类型:长光栅测量直线位移圆光栅测量角位移莫尔条纹:两块光栅尺叠合时,出现光的若干条明暗相间的条文,叫莫尔条纹L≈W/θ(2)工作原理:光栅是利用莫尔条纹的放大特性,将主光栅与指示光栅的相对微小移动转化成放大了的莫尔条纹的移动,经光电传感器检测莫尔条纹移动的大小,再通过辨向电路辨别莫尔条纹移动方向
从而检测出被测物的位移
为了测量更小的位移量,通常还采用细分技术,细分电路的目的是在光栅移动一个栅距时,通过细分电路等间距的输出多个脉冲,从而达到提高分辨率的目的
(3)练一练①关于莫尔条纹的叙述,错误的是()A消除了光栅刻线的不均匀误差B放大了光栅栅距C莫尔条纹与光栅尺移动量和方向有着严格的对应关系D莫尔条纹间距与栅距之间满足关系式L≈W/θ②光栅在使用中,采用两个光电元件的目的是()A进行电学细分,提高测量分辨力B信号放大C辨别移动方向D差分测量,提高抗干扰能力③利用光栅产生的莫尔条纹与光栅栅线的夹角为()A与刻线间的夹角有关B近似0°C近似45°D近似90°④某光栅的光栅条文的夹角为0
05rad,栅距为0
1mm,则莫尔条纹的宽度为()A1