矢量控制中转子磁链的自适应观测及电机参数辨识郑晓露、刘红星(郑州电力机械厂,河南 郑州 450004)摘 要:为了在现代异步电机高性能调速矢量控制系统中实现磁链的准确观测及参数的在线辨识,本文提出了一种模型参考自适应观测方法
在电机运行过程中,以电机为参考模型,构造了一种可调模型,建立了一个模型参考自适应系统,对电机的转子磁链及其易变参数进行了实时在线观测
仿真结果表明,观测器能够准确观测转子磁链及电机参数
关键词:转子磁链 自适应观测器 正实误差 参数辨识1 引言在现代异步电机变频矢量控制调速系统中,准确观测转子磁链是系统取得高性能的前提条件,也是矢量控制的关键技术
磁链观测有两种基本方法:电流模型法和电压模型法电流模型涉及到时变特性显著的转子时间常数主要是转子电阻,当电机的运行温度发生变化或磁链出现饱和时,转子电阻变化范围较大,影响了矢量控制的性能;电压模型为纯积分环节,误差积累和漂移问题严重,容易导致系统失稳,而且在低速时,定子电阻的压降作用明显,测量误差淹没了反电动势,使得观测精度较低
本文提出了一种基于模型参考的磁链自适应观测方法,在观测磁链的同时对易受温度影响的定、转子电阻进行在线辨识建立了仿真模型,并给出了仿真实验的结果
2 观测模型及误差模型的建立在转子坐标系下,以定子电流和转子磁链为状态变量,定子电压为输入变量,以鼠笼式感应电机为例,电机的状态方程表示如下式[4]: (1)因为电感参数基本不随电动机的温升而变化,当激磁情况一定时,它们是基本不变的
所以为减少可调参数,假设定、转子互感及自感已知,而且转速可测
取(1)式的 1、3、4 行简写如下: (2)其中:,
根据(2)式构造观测模型如下: (3)式中,
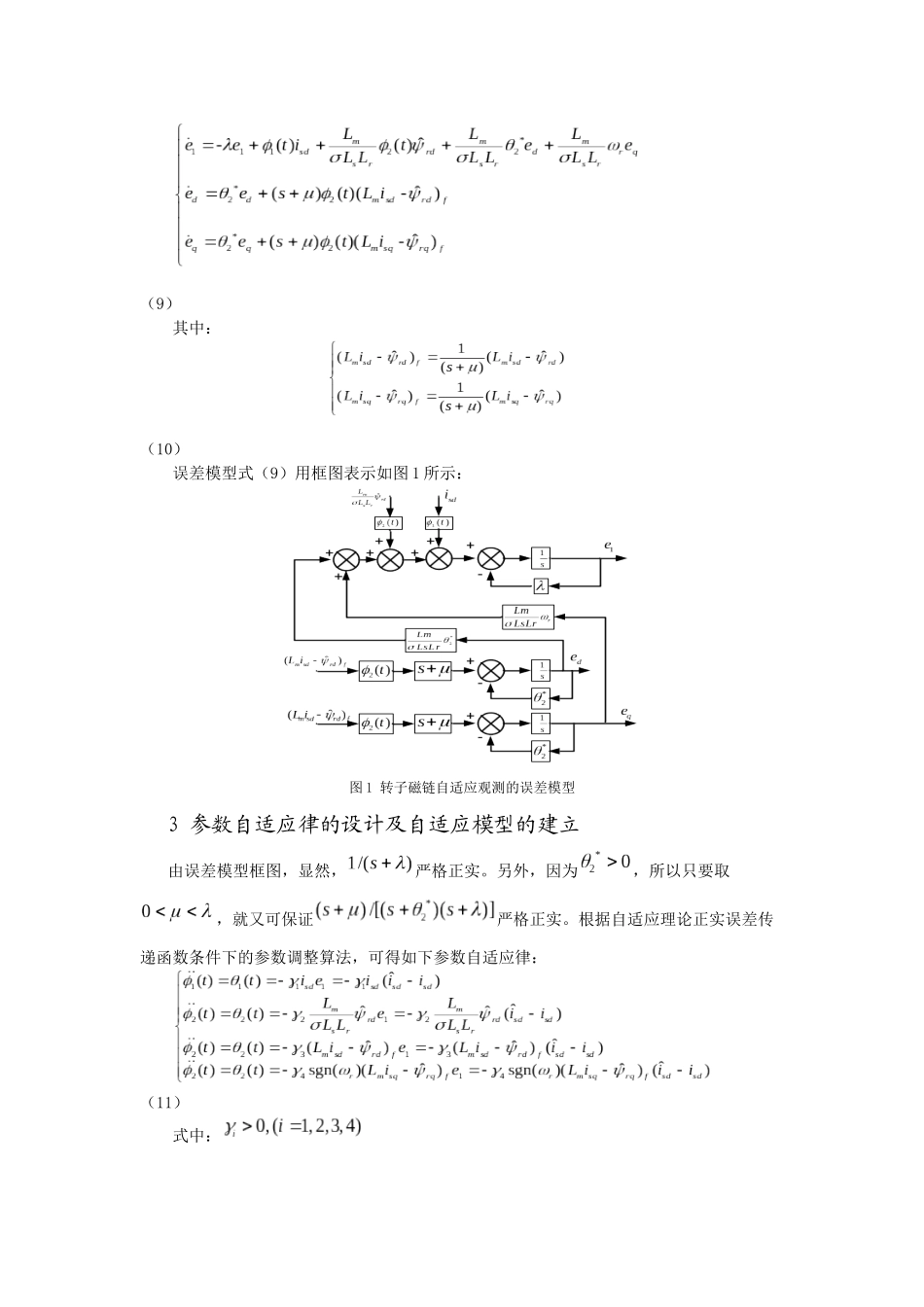
其中是为最终得到正实误差模型而引入的,其中的微分作用将在下面推导中去掉
定义参数偏差: (4)从而有: (5)定义状态偏差: (6)将式(5)代入式