第一章 概述1、机电一体化术语的来源:最早(1971 年)起源于日本2、机电一体化乃是在机械的主功能、动机功能、信息功能和控制功能上引进微电子技术, 并将机械装置与微电子装置用相关软件有机结合而构成的系统的总称
3、机电一体化系统(产品)构成的五大部分(或子系统)是:控制器、检测传感器、执行 元件、动力源、机构
P64、机电一体化系统设计的考虑方法通常有:机电互补法、融合(结合)法和组合法
例:机电一体化系统设计考虑方法及设计类型考虑方法——(1)机电互补法 (2)结合(融合)法设计类型——(1)开发性设计 (2)适应性设计 (3)变异性设计第二章 机械系统部件的选择与设计1、为确保机械系统的传动精度和工作稳定性,在设计中常提出低摩擦、无间隙、低惯量、 高刚度、高谐振频率、适当的阻尼比等要求
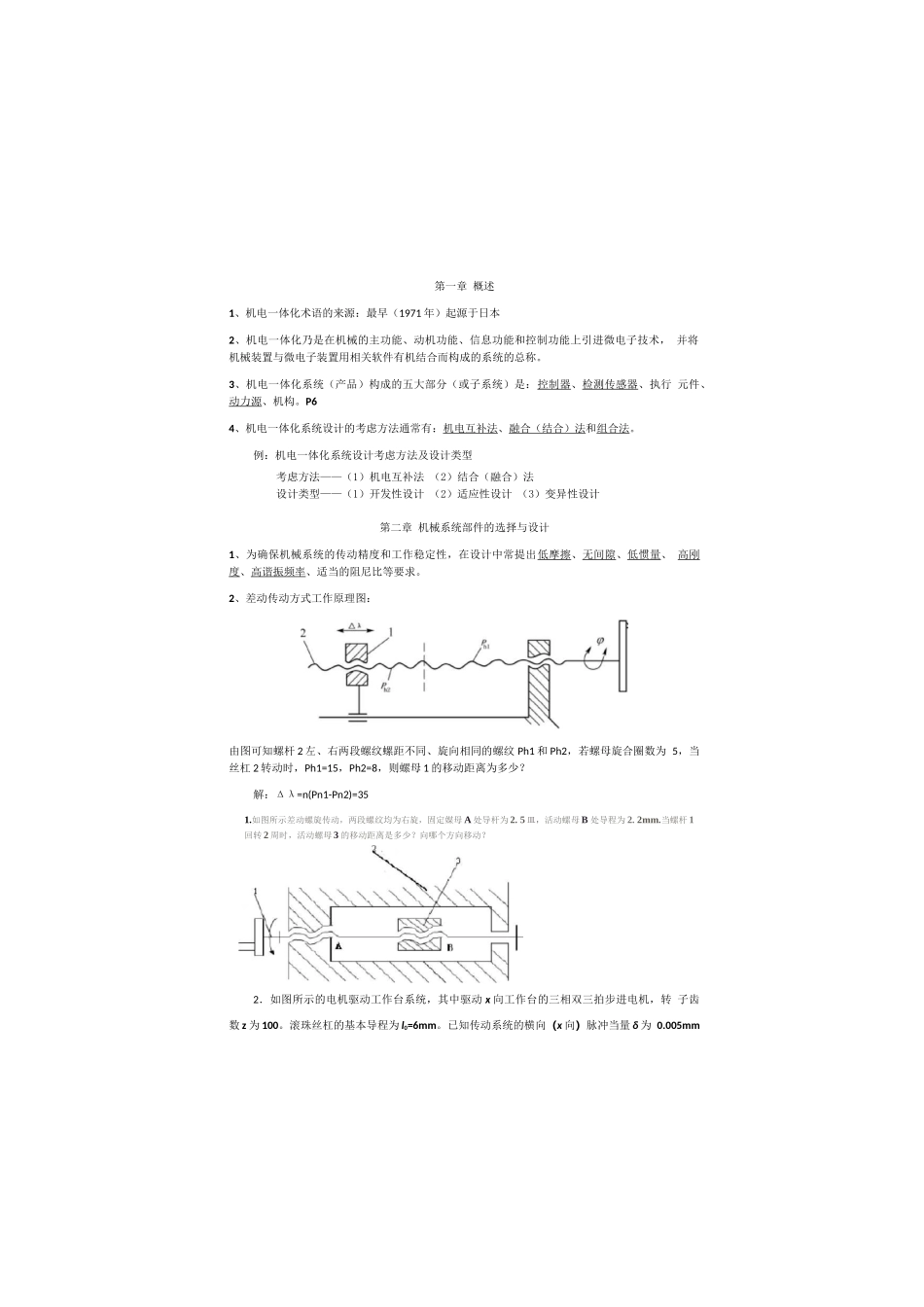
2、差动传动方式工作原理图:由图可知螺杆 2 左、右两段螺纹螺距不同、旋向相同的螺纹 Ph1 和 Ph2,若螺母旋合圈数为 5,当丝杠 2 转动时,Ph1=15,Ph2=8,则螺母 1 的移动距离为多少
解:Δλ=n(Pn1-Pn2)=351
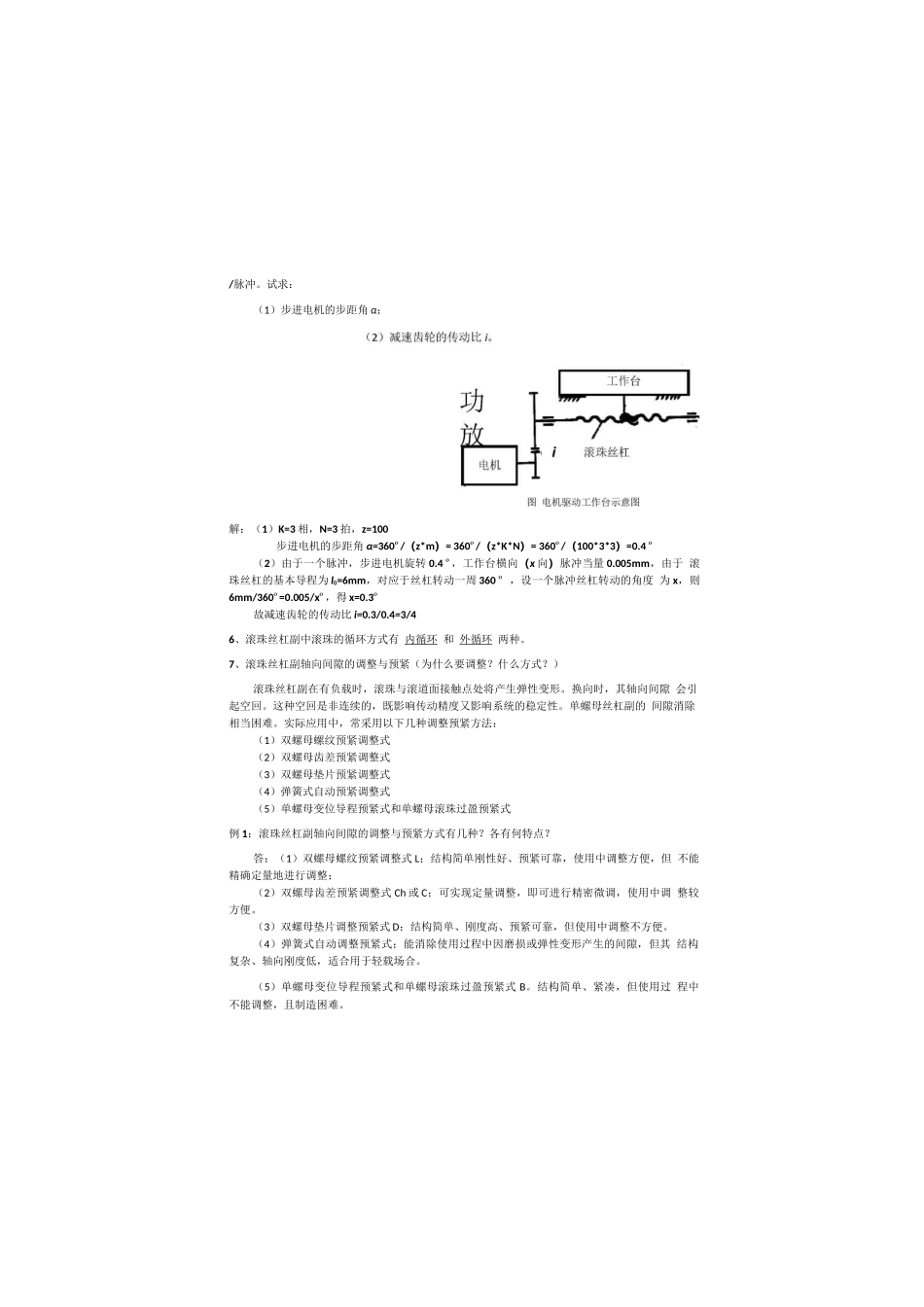
如图所示差动螺旋传动,两段螺纹均为右旋,固定媒母 A 处导杆为 2
5 皿,活动螺母 B 处导程为 2
当螺杆 1回转 2 周时,活动螺母 3 的移动距离是多少
向哪个方向移动
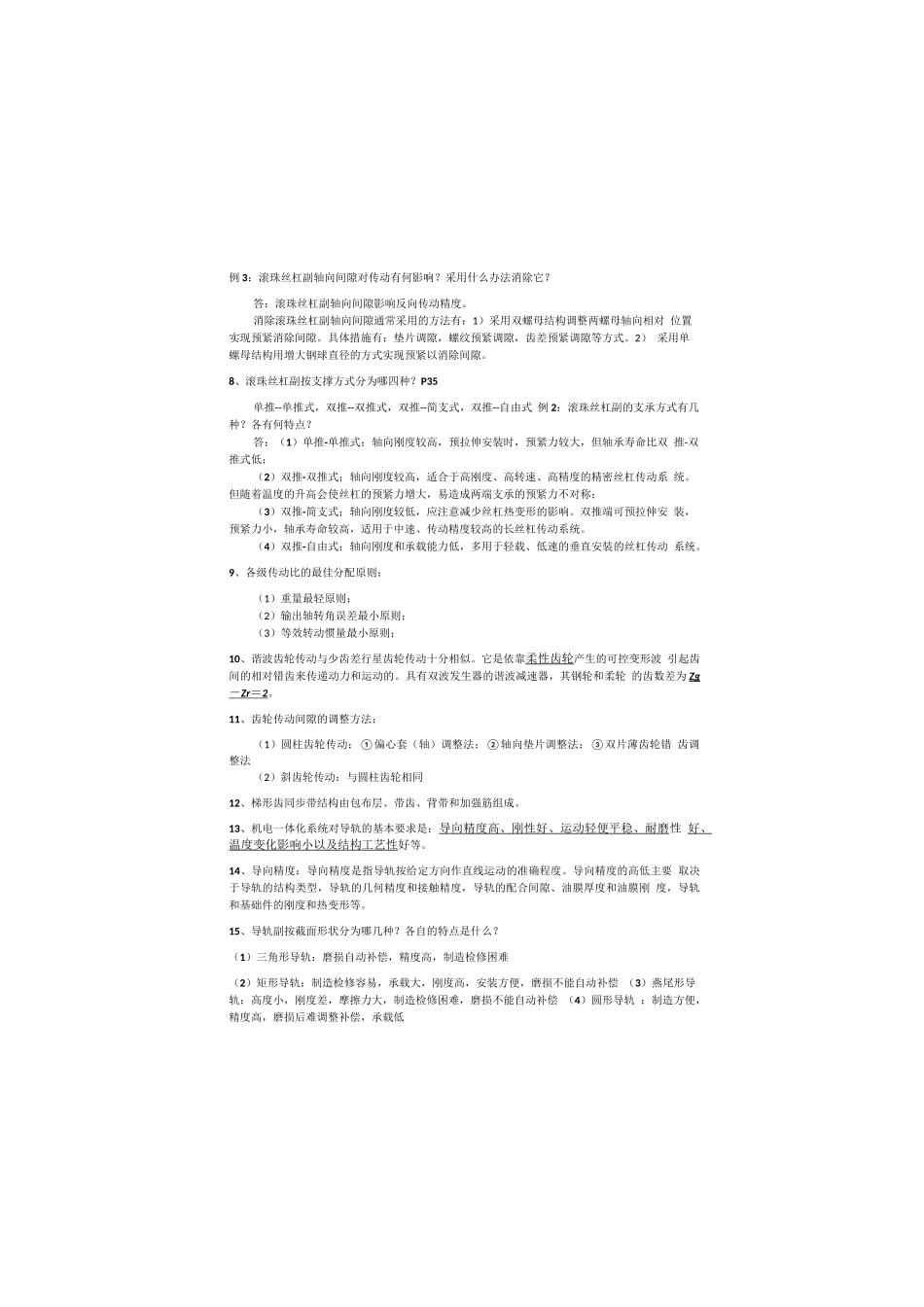
2.如图所示的电机驱动工作台系统,其中驱动 x 向工作台的三相双三拍步进电机,转 子齿数 z 为 100
滚珠丝杠的基本导程为 l0=6mm
已知传动系统的横向(x 向)脉冲当量 δ 为 0
005mm/脉冲
试求:(1)步进电机的步距角 α;解:(1)K=3 相,N=3 拍,z=100步进电机的步距角 α=360º/(z*m)= 360º/(z*K*N)= 360º/(100*3*3)=0
4 º(2)由于一个脉冲,步进电机旋转 0
4 º,工作台横向(x