零组件前期准备 1、打开需要制作动画的零件(组件)如 zuo
prt 2、为零件添加新坐标系 CS0
添加新坐标系的好处是,坐标系独立出来,零件的形状可以任意,不受父子参照等关系等因素影响
方便后期的修改
点击 以默认坐标系 CYS_PART_DEF 为参照,输入偏移量
新坐标系 CS0 最好位于该零件的几何形心处,好处是零件转动时所包络的空间最小
换句话说,有限图片大小时,零件可以显示最大
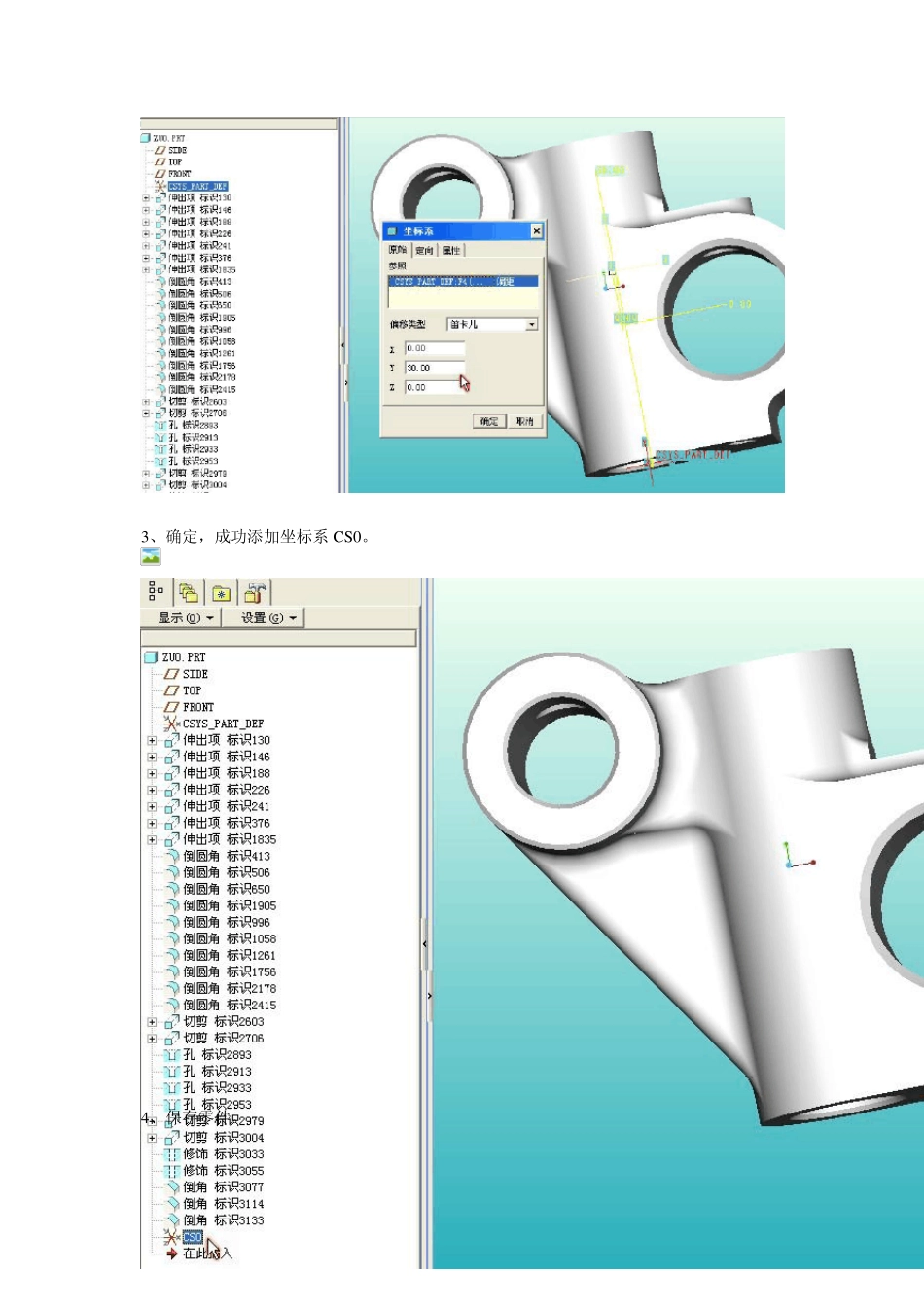
3、确定,成功添加坐标系 CS0
4、保存零件
组件准备 1、新建一组件,如,zuo
2、点击 插入刚才修改的零件zuo
prt 3、选择 “坐标系” 装配关系 4、分别选取 zuo
prt 中新建的坐标系 CS0 和组件 zuo
asm 的坐标系 ASM_DEF_CSYS 目的是先定位零件 zuo
否则前面建立的坐标系毫无意义,而且 zuo
prt 位置也不确定
这两个坐标系重合 坐标系 (Coordinate Sy stem)—用组件坐标系对齐元件坐标系
5、更改约束类型为 6DOF 6、点击 后面的 完成 zuo
prt 的约束定位
7、保存 zuo
机构设计 1、进入机构设计
注意,坐标系CS0 处的变化,每个轴由一个旋转一个移动自由度,3 根轴,共计6 个自由度
注: 引用: 6DOF—包含一个坐标系和一个偏距值,允许在各个方向上移动
2、添加伺服电机,电机伺服电动机图标
目的是驱动零件 zuo
prt 旋转 3、选取任意一轴,如 y 轴的弧形箭头,该箭头表示 y 轴的旋转
选择后的结果 4、切换到轮廓对话框,在规范中选择 “速度”,在 A 框中输入 30
参数的含义是,该零件绕y 轴旋转的角速度是30°/秒,即转一轴需要12 秒
y 轴上显示螺旋线,表示伺服电机添加成功
6、同理,重复 2~5,添加另外