2MN 快锻油压机主动作动态特性仿真分析研究目的采用AMESim软件仿真分析手段,通过本课题的完成,使学生对阀控缸电液位置伺服系统的相关理论进行更为深入的学习,重点掌握以下知识点:1) 阀控缸位置控制系统数学模型;2) AMESim 阀控缸位置控制系统仿真模型建立;3) 阀控缸位置控制系统的动态响应分析(时域分析、频域分析);4) 总结得出影响阀控缸位置控制参数对其系统频率的影响规律
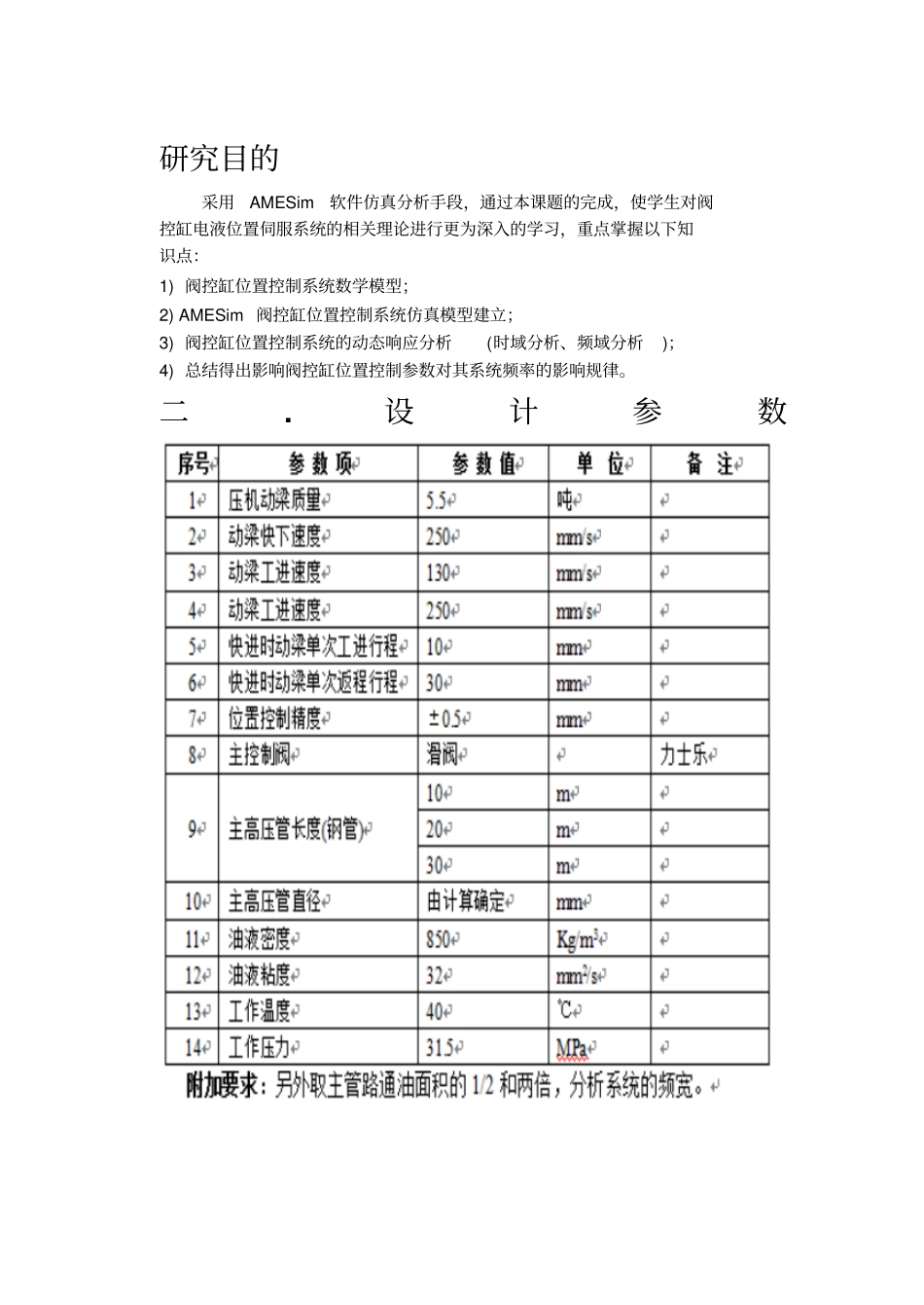
设计参数三、设计要求及完成过程
1) 2MN 快锻油压机主动作系统计算及原理设计;
2) 2MN 快锻油压机主动作系统数学模型;
3) 采用 AMESim 软件建立 2MN 快锻油压机主动作系统仿真模型;
4) 得出主动作系统的时间响应曲线和频率响应曲线,得出系统的频宽
5) 总结影响阀控缸系统频率特性的参数,并总结规律
四.模拟仿真模型2MN 快锻油压机主动作包括快下、工进和回程三个动作
快下动作要求速度大,节约时间,来增加经济效益,本题目要求250mm/s,控制位移为20mm,此时主要是通过上位油箱补油
工进过程控制速度130mm/s,控制位移为 10mm
回程要求控制速度为250mm/s,位移控制为 30mm
在回程之前由于缸上腔充满高压油,所以之前有一个卸压过程
将 2MN 快锻油压机主动作过程分解,对每个动作过程分别进行模拟仿真,建立各个过程的传递函数
快下系统原理图:快下速度快下行程 :缸面积 :缸流量 :泵: n=1000r/min (500ml/r) 数学模型建立1
液压缸的流量连续性方程流入液压缸的流量流出液压缸的流量负载流量由于活塞是靠m 的重量向下移动 ,所以可认为为液压缸的外泄系数,其中2、缸和负载的力平衡方程快下过程中只有惯性力, 粘性力,由于粘性力很小, 故可以忽略1V =250mm/s1L =20 mm220
5FMsmPM0
143sRmπ