精品中国矿业大学 2010~2011 学年第 1 学期《实用摄影测量学基础》试卷(A)卷课程编号: 07173 考试时间: 100分钟考试方式:闭卷姓名 _________ 班级_________ 班级序号_________ 成绩 ___________题号一二三四五总分得分一、写出中心投影的共线方程式并说明式中各参数的含义
(12 分)二、已知相对定向的误差方程式:vuuqbvNvNqqdbwvdbdNudNwvwdNwvuv22112222222222222)(说明误差方程式中各项系数的求解或确定方法并给出其迭代计算流程图
(18 分)三、指出采用“后方交会+前方交会”和“相对定向+绝对定向”两种方法计算地面点坐标的基本步骤
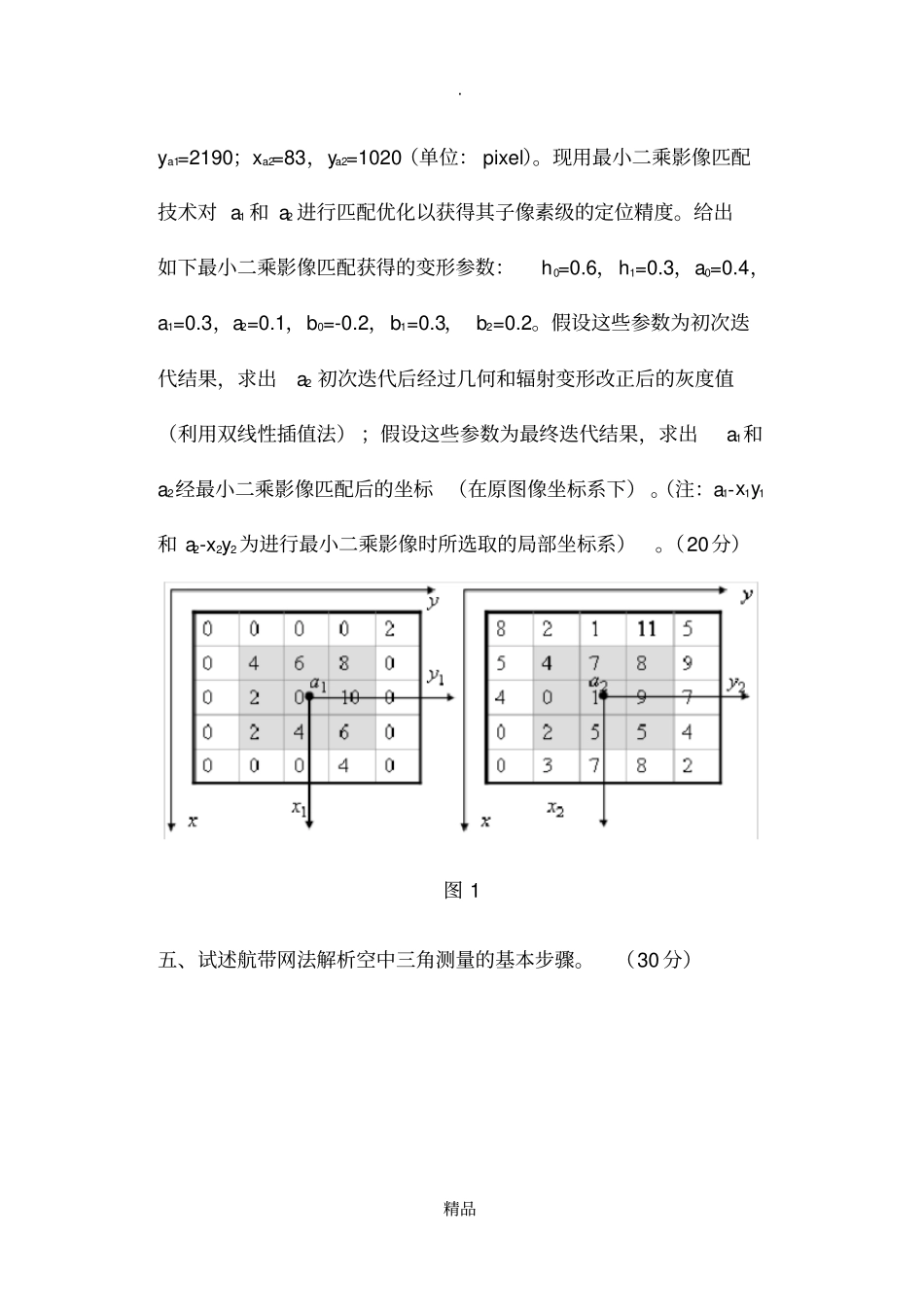
(20 分)四、如下图 1,选择 3×3 窗口进行相关系数匹配时获得了一对同名像点坐标 a1(左影像)和 a2(右影像),图像坐标为 xa1=80,
精品ya1=2190;xa2=83,ya2=1020(单位: pixel)
现用最小二乘影像匹配技术对 a1 和 a2 进行匹配优化以获得其子像素级的定位精度
给出如下最小二乘影像匹配获得的变形参数:h0=0
6,h1=0
3,a0=0
4,a1=0
3,a2=0
1,b0=-0
2,b1=0
3, b2=0
假设这些参数为初次迭代结果,求出a2 初次迭代后经过几何和辐射变形改正后的灰度值(利用双线性插值法) ;假设这些参数为最终迭代结果,求出a1和a2经最小二乘影像匹配后的坐标 (在原图像坐标系下)
(注:a1-x1y1和 a2-x2y2为进行最小二乘影像时所选取的局部坐标系)
(20分)图 1五、试述航带网法解析空中三角测量的基本步骤
(30 分)
精品地理 2005《实用摄影测量学基础》试卷(答题时间: 100 分钟)(B 卷)姓名 _________ 班级_________ 班