18 第 2 章 自动控制系统的数学模型辅导[ 学习目标 ] 熟练掌握:传递函数的概念和性质,典型环节的传递函数;掌握:利用系统动态结构图的等效变换来求取传递函数的方法;了解:建立动态系统微分方程的一般方法控制系统微分方程的建立一
机械系统机械系统一般分为两大类,即直线运动系统和旋转运动系统,其基本组成器件是质量、弹簧和阻尼器等,支配机械系统的基本定律是牛顿运动定律和力、力矩平衡定律
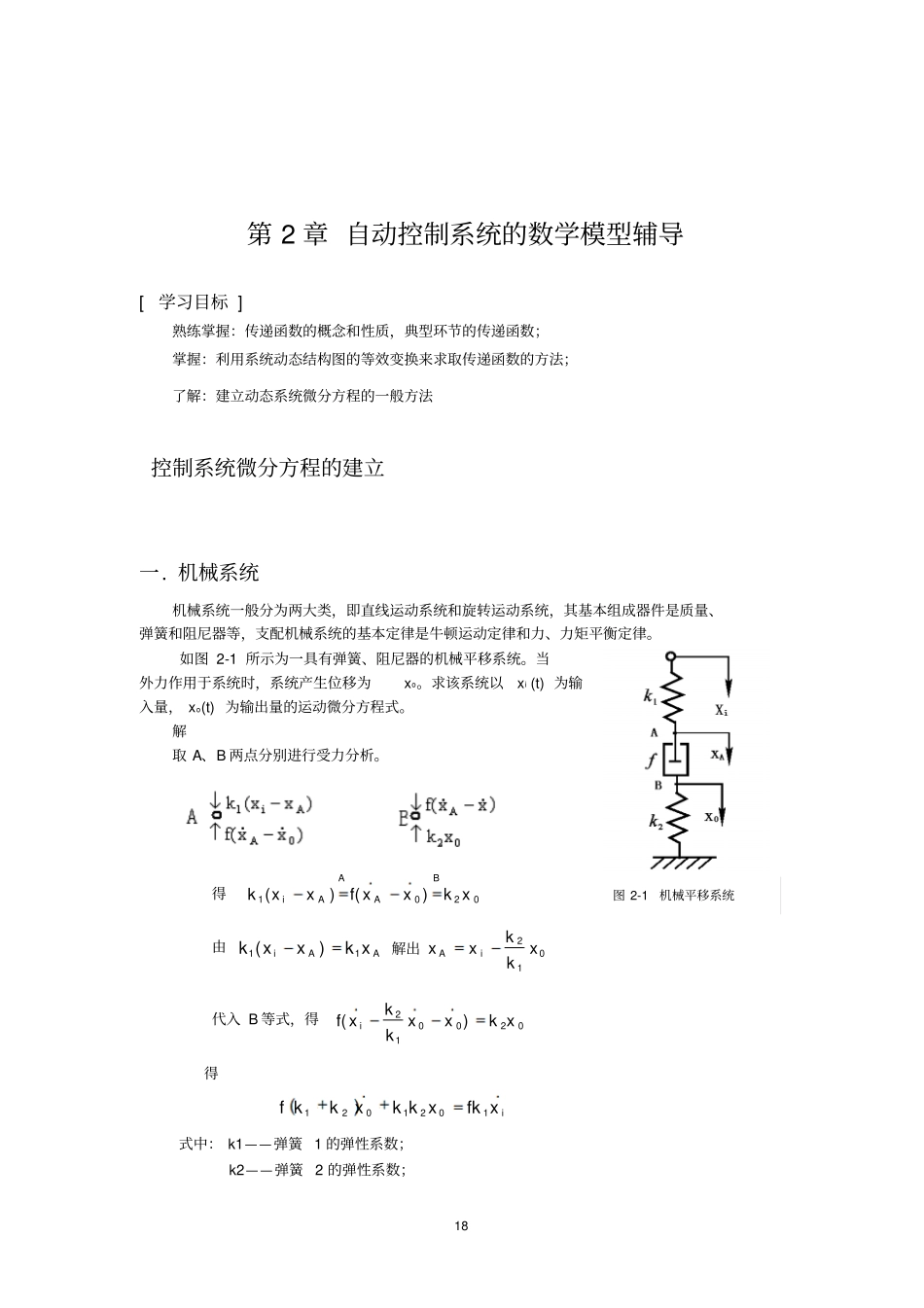
如图 2-1 所示为一具有弹簧、阻尼器的机械平移系统
当外力作用于系统时,系统产生位移为xo
求该系统以xi (t) 为输入量, xo(t) 为输出量的运动微分方程式
解取 A、B 两点分别进行受力分析
得02B0AAAi1xk)xxf()xx(k由A1Ai1xk)xx(k解出012iAxkkxx代入 B 等式,得020012ixk)xxkkxf(得i1021021xfkxkkxkkf式中: k1——弹簧 1 的弹性系数;k2——弹簧 2 的弹性系数;图 2-1 机械平移系统19 f——阻尼器的阻尼系数
电气系统电气系统的基本元件是电阻、电容、 电感以及电动机等,支配电气系统的基本定律是基尔霍夫电路定律
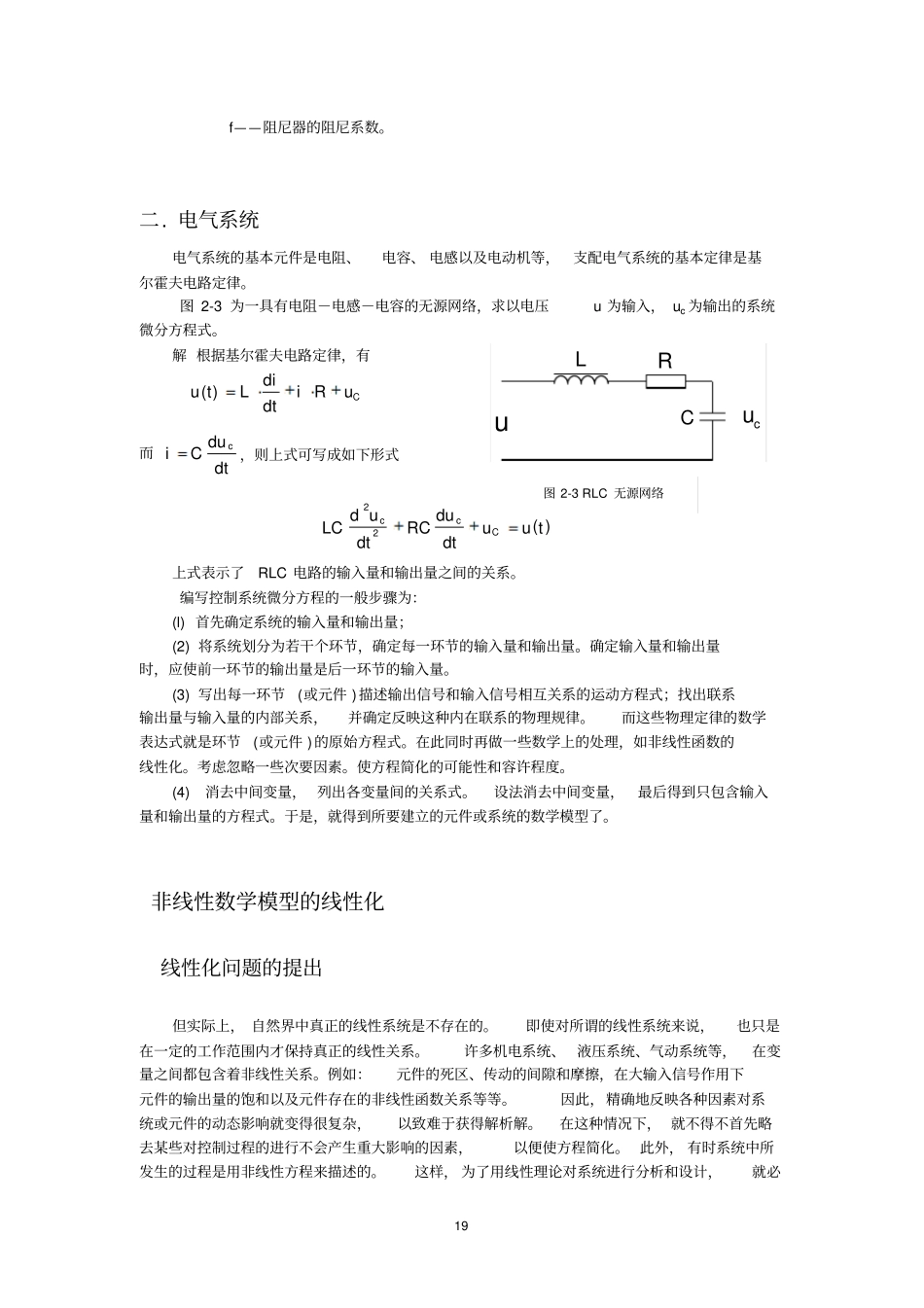
图 2-3 为一具有电阻-电感-电容的无源网络,求以电压u 为输入, uc 为输出的系统微分方程式
解 根据基尔霍夫电路定律,有CuRidtdiLtu )(而dtduCic ,则上式可写成如下形式)(22tuudtduRCdtudLCCcc上式表示了RLC 电路的输入量和输出量之间的关系
编写控制系统微分方程的一般步骤为:(l) 首先确定系统的输入量和输出量;(2) 将系统划分为若干个环节,确定每一环节的输入量和输出量
确定输入量和输出量时,应使前一环节的输出量是后一环节的输入量
(3) 写出每一环节(或元件 )描述输出信号和输入信号相互关系的运动方程式;找出联系输出量与输入量的内部关