1 / 6 汽车电动助力转向系统的动态模型与助力特性在实现助力转向过程中, 当转向盘转矩已知时, 助力电动机提供多大转矩才最合适,这是实现控制系统的核心, 亦即准确求出助力特性
该助力特性反映了转向盘转矩和助力电动机提供的助力力矩之间的关系,在分析助力电机的助力特性之前,我们先来建立电动助力转向的动态模型
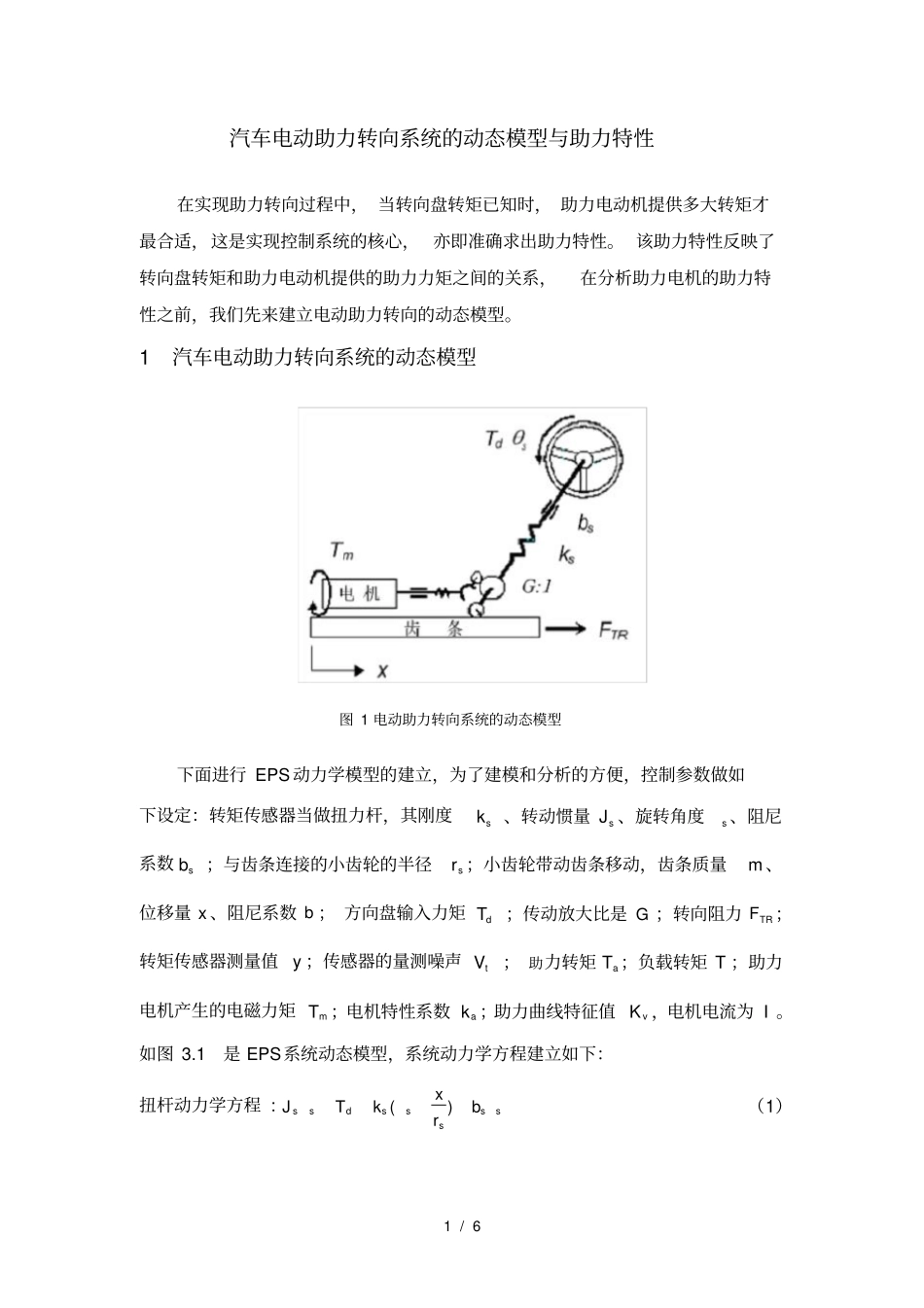
1 汽车电动助力转向系统的动态模型图 1 电动助力转向系统的动态模型下面进行 EPS 动力学模型的建立,为了建模和分析的方便,控制参数做如下设定:转矩传感器当做扭力杆,其刚度sk、转动惯量sJ 、旋转角度s 、阻尼系数sb;与齿条连接的小齿轮的半径sr ;小齿轮带动齿条移动,齿条质量m 、位移量 x 、阻尼系数 b ; 方向盘输入力矩dT;传动放大比是 G ;转向阻力TRF;转矩传感器测量值y ;传感器的量测噪声tV; 助力转矩aT ;负载转矩 T ;助力电机产生的电磁力矩mT ;电机特性系数ak ;助力曲线特征值vK ,电机电流为 I
1 是 EPS系统动态模型,系统动力学方程建立如下:扭杆动力学方程 :sssssdssbrxkTJ)((1)2 / 6 齿条动力学方程 :TRsassssFxbrTrxrkxm)((2)转矩传感器方程 :tsssVrxky)((3)助力电机转矩方程:IkTam(4)助力特性方程:yKIv(5)减速器转矩方程:maGTT(6)负载转矩:yTTa(7)该系统中方向盘转矩dT 为指令输入,输出量为助力转矩aT ,此外还要考虑干扰因素
式 (l) 描述了扭杆的转矩关系,作用在扭杆上的转矩主要有方向盘输入转矩、输出轴对扭杆的反作用转矩
式(2) 描述了齿条的受力情况,施加在齿条上的力是由方向盘手力、 助力电机转转产生的作用力、 路面扰动三方面所引起的
由式(3) 可知:转矩传感器测量的值与输入轴和输出轴转角之差成正比
s 为输入轴转角