自动控制原理实验指导书自动化工程学院自动控制系下载后可任意编辑第一章实验使用仪器及其连接方式一、 PC 机硬件要求: CPU Pentium、 Pentium Pro、 Pentium II、 Pentium III、 AMD Athlon 或者更高; 内存 至少 64MB, 推举 256MB 以上; 硬盘 至少预留 500MB 的硬盘空间; 支持 RS-232 串口通信
软件要求: Microsoft Windows 98; Visual C++ 6
Matlab 6
x其中 Visual C++软件环境可根据用户具体要求自行选择
二、 可选择的配套设备模拟机 可用来进行控制律设计以及校正网络设计
信号发生器 可用来提供各种输入信号, 如阶跃信号、 正弦信号等; 双线示波器 可用来观看系统的输入和输出曲线; 数字万用表 可用来精确测量系统的输入输出值
三、 电平转换器电平转换器是 XZ-IIC 型做随动系统控制实验时所需用的信号转换器
该电平转换器是把外界输入的模拟信号和系统能接收的信号进行转换, 即把外界的模拟信号( 当反馈比例为 1 时为-5V--+5V, 如为其它则相应地增大或缩小) 转换成 0--+5V 的转矩信号和方向信号( DIR) ; 同时把 DSP 输出的 0—+5V 的信号转换成-5V--+5V的模拟信号
也就是说, 电机的转动对输入电压的符号无法识别, 下载后可任意编辑故需把输入电压的符号转换成系统能识别的逻辑信号, 经过逻辑值来控制电机转动的方向, 同时把电位器的反馈信号转换成有符号的电压值输出, 如图 1 所示
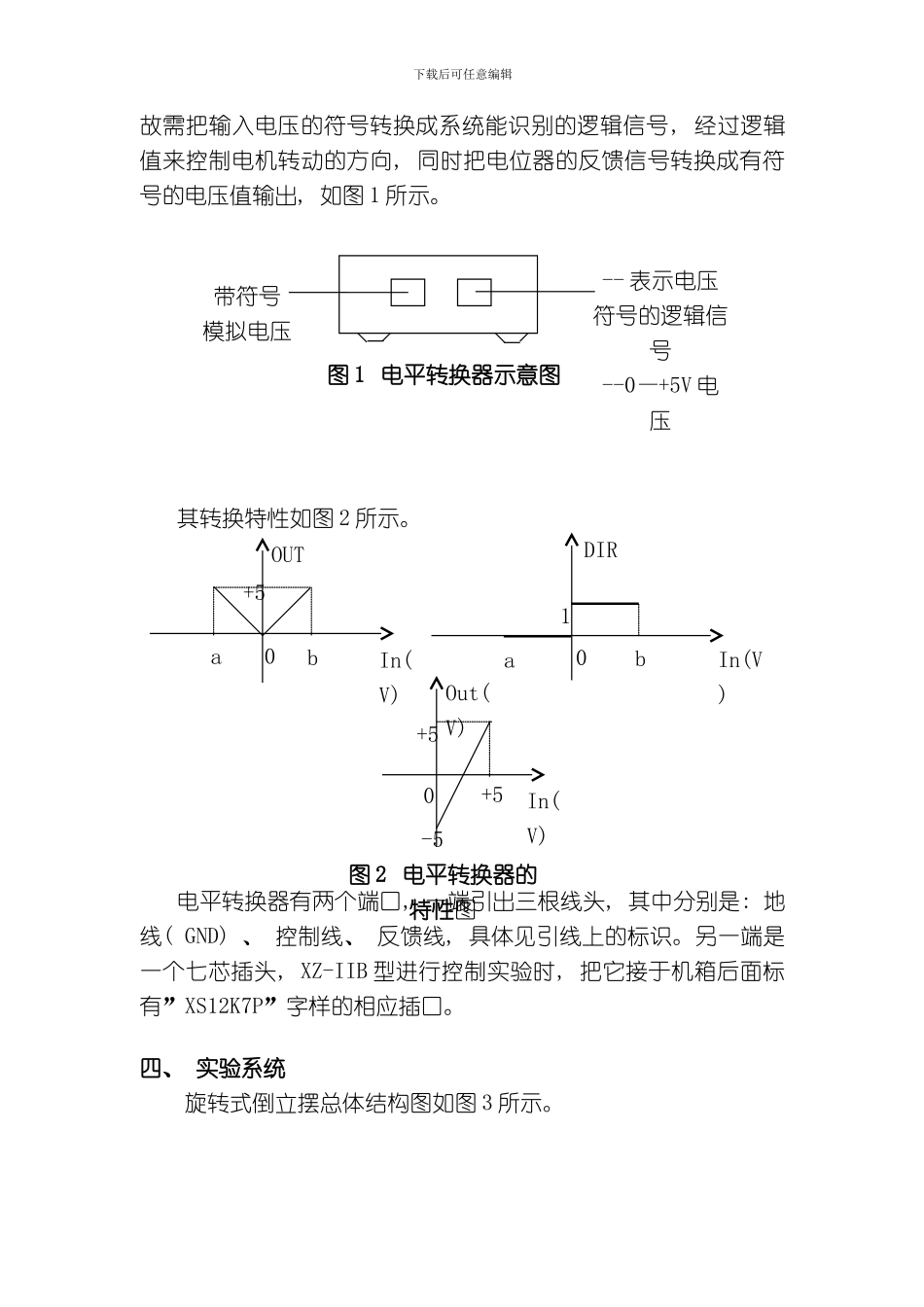
其转换特性如图 2 所示
电平转换器有两个端口, 一端引出三根线头, 其中分别是: 地线( GND) 、 控制线、 反馈线, 具体见引线上的标识
另一端是一个七芯插头, XZ-IIB 型进行控制实验时,