《现代控制理论》讲义第五章状态反馈控制器设计1 Chapter5 状态反馈控制器设计控制方式有“开环控制”和“闭环控制”
“开环控制”就是把一个确定的信号(时间的函数)加到系统输入端,使系统具有某种期望的性能
然而,由于建模中的不确定性或误差、 系统运行过程中的扰动等因素使系统产生一些意想不到的情况,这就要求对这些偏差进行及时修正,这就是“反馈控制”
在经典控制理论中,我们依据描述控制对象输入输出行为的传递函数模型来设计控制器,因此只能用系统输出作为反馈信号,而在现代控制理论中, 则主要通过更为广泛的状态反馈 对系统进行综合
通过状态反馈来改变和控制系统的极点位置可使闭环系统具有所期望的动态特性
利用状态反馈构成的调节器,可以实现各种目的, 使闭环系统满足设计要求
参见138P例 5
3,通过状态反馈的极点配置, 使闭环系统的超调量%5p,峰值时间(超调时间)st p5
0,阻尼振荡频率10d
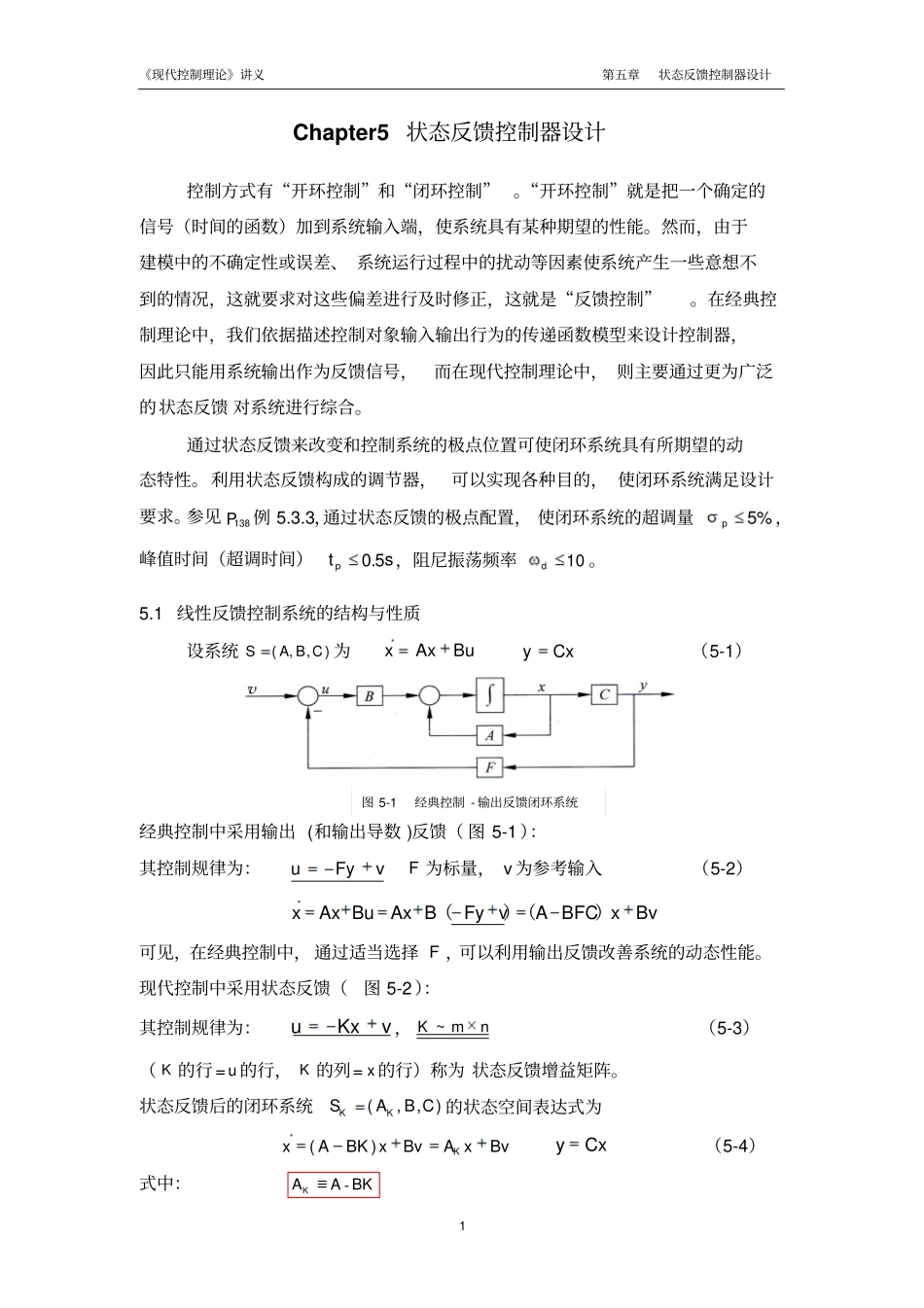
1 线性反馈控制系统的结构与性质设系统),,(CBAS为BuAxxCxy(5-1)经典控制中采用输出 (和输出导数 )反馈( 图 5-1 ):其控制规律为:vFyuF 为标量, v 为参考输入(5-2)BvxBFCAvFyBAxBuAxx)()(可见,在经典控制中, 通过适当选择 F ,可以利用输出反馈改善系统的动态性能
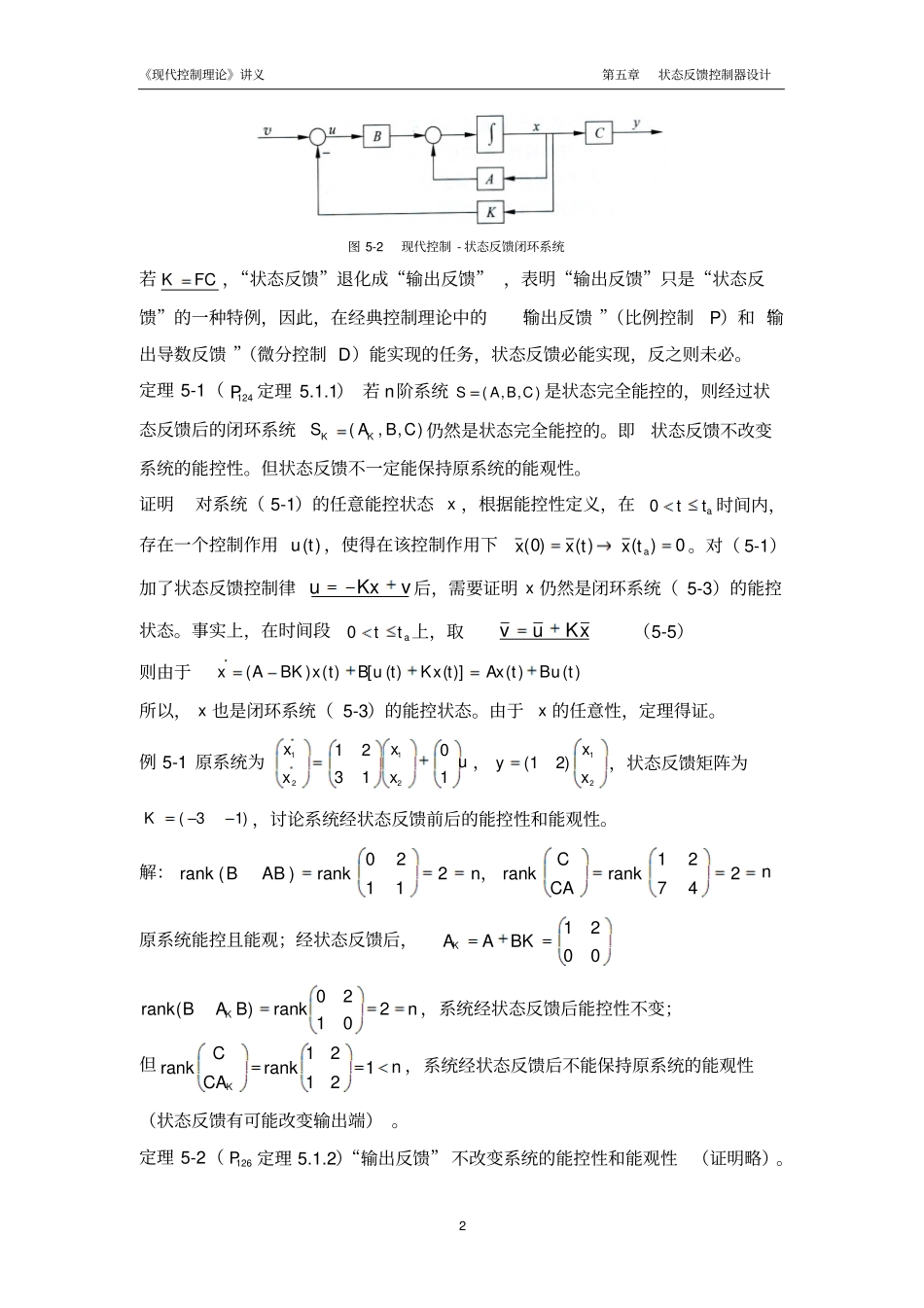
现代控制中采用状态反馈(图 5-2 ):其控制规律为:vKxu,nmK ~(5-3)( K 的行 = u 的行, K 的列= x 的行)称为 状态反馈增益矩阵
状态反馈后的闭环系统),,(CBASKK的状态空间表达式为BvxABvxBKAxK)(Cxy(5-4)式中:BKAAK-图 5-1 经典控制 - 输出反馈闭环系统《现代控制理论》讲义第五章状态反馈控制器设计2 图 5-2 现代控制 - 状态反馈闭环系统若FCK,“状态反馈”退化成“输出反馈” ,表明