实验名称:前馈控制系统班级:姓名:学号:实验四前馈控制系统一、实验目的(1)通过本实验,了解前馈控制系统的基本结构及工作原理
(2)掌握前馈控制系统的设计思想和控制器的参数整定方法
二、实验原理干扰对系统的作用是通过干扰通道进行的
前馈控制的原理是给系统附加一个前馈通道(或称前馈控制器),使所测量的系统扰动通过前馈控制器改变控制量
利用扰动所附加的控制量与扰动对被控制量影响的叠加消除或减小干扰的影响
前馈控制系统主要特点如下:1)属于开环控制只要系统中各环节是稳定的,则控制系统必然稳定
但若系统中有一个环节不稳定,或局部不稳定,系统就不稳定
另外,系统的控制精度取决于构成控制系统的每一部分的精度,所以对系统各环节精度要求较高
2)很强的补偿局限性前馈控制实际是利用同一干扰源经过干扰通道和前馈通道对系统的作用的叠加来消除干扰的影响
因此,固定的前馈控制只对相应的干扰源起作用,而对其他干扰没有影响
而且,在工程实际中,影响生产过程的原因多种多样,系统随时间、工作状态环境等情况的变化,也会发生变化甚至表现出非线性,这些都导致不可能精确确定某一干扰对系统影响的程度或数学描述关系式
因此,前馈控制即使对单一干扰也难以完全补偿
3)前馈控制反应迅速在前馈控制系统中,信息流只向前运行,没有反馈问题,因此相应提高了系统反应的速度
当扰动发生后,前馈控制器及时动作,对抑制被控制量由于扰动引起的动静态偏差比较有效
这非常有利于大迟滞系统的控制
4)只能用于可测的干扰对不可测干扰,由于无法构造前馈控制器而不能使用
按结构,前馈控制可分为静态前馈控制、动态前馈控制、前馈-反馈复合控制系统、前馈-串级复合控制系统等
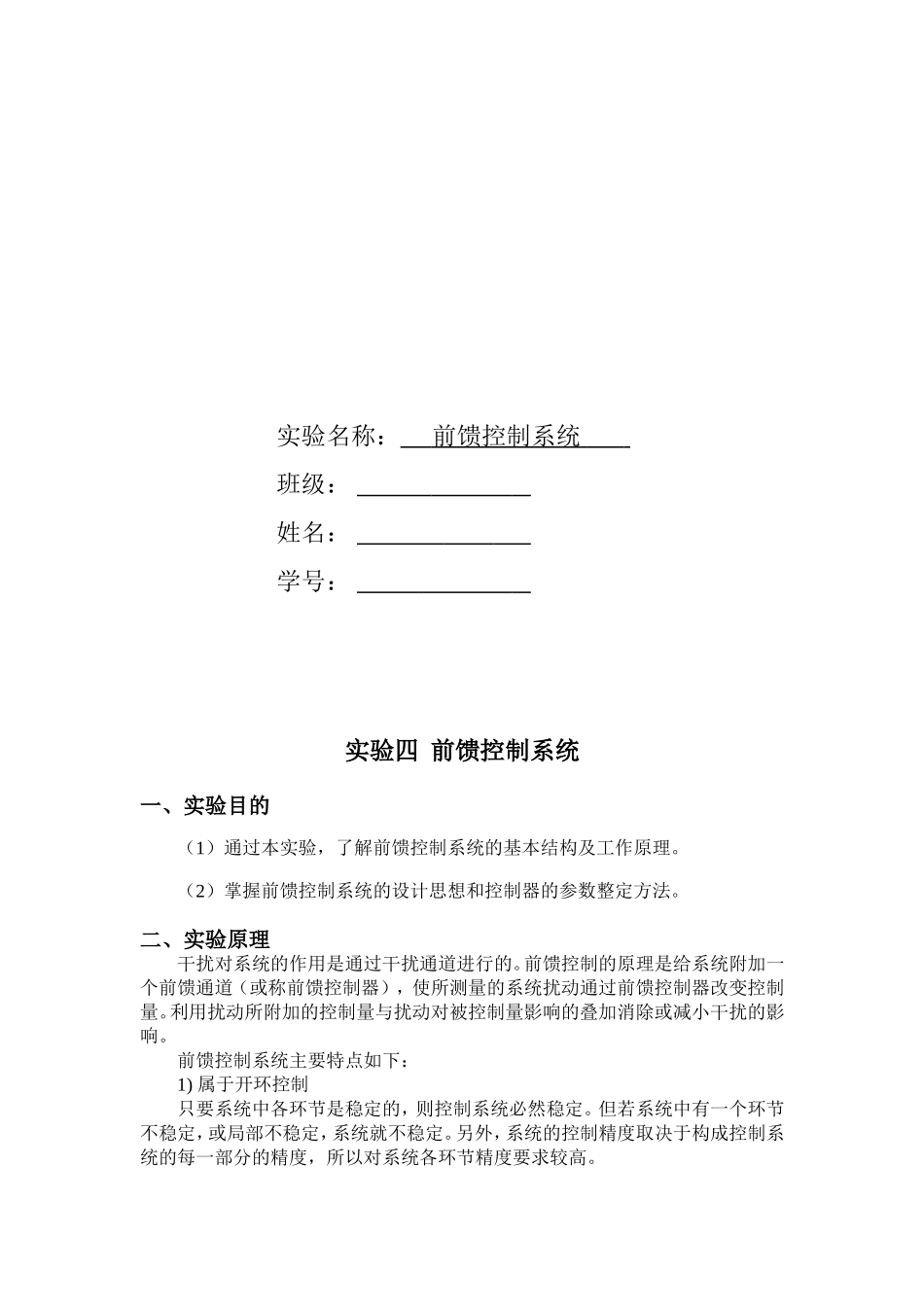
一个典型的前馈-反馈复合控制系统如图1所示
前馈-反馈复合控制和前馈-串级复合控制系统的工程整定方法主要有两种:1)前馈控制和反馈或串级分别整定,确定各自参数,然后组合在一起;2)首先整