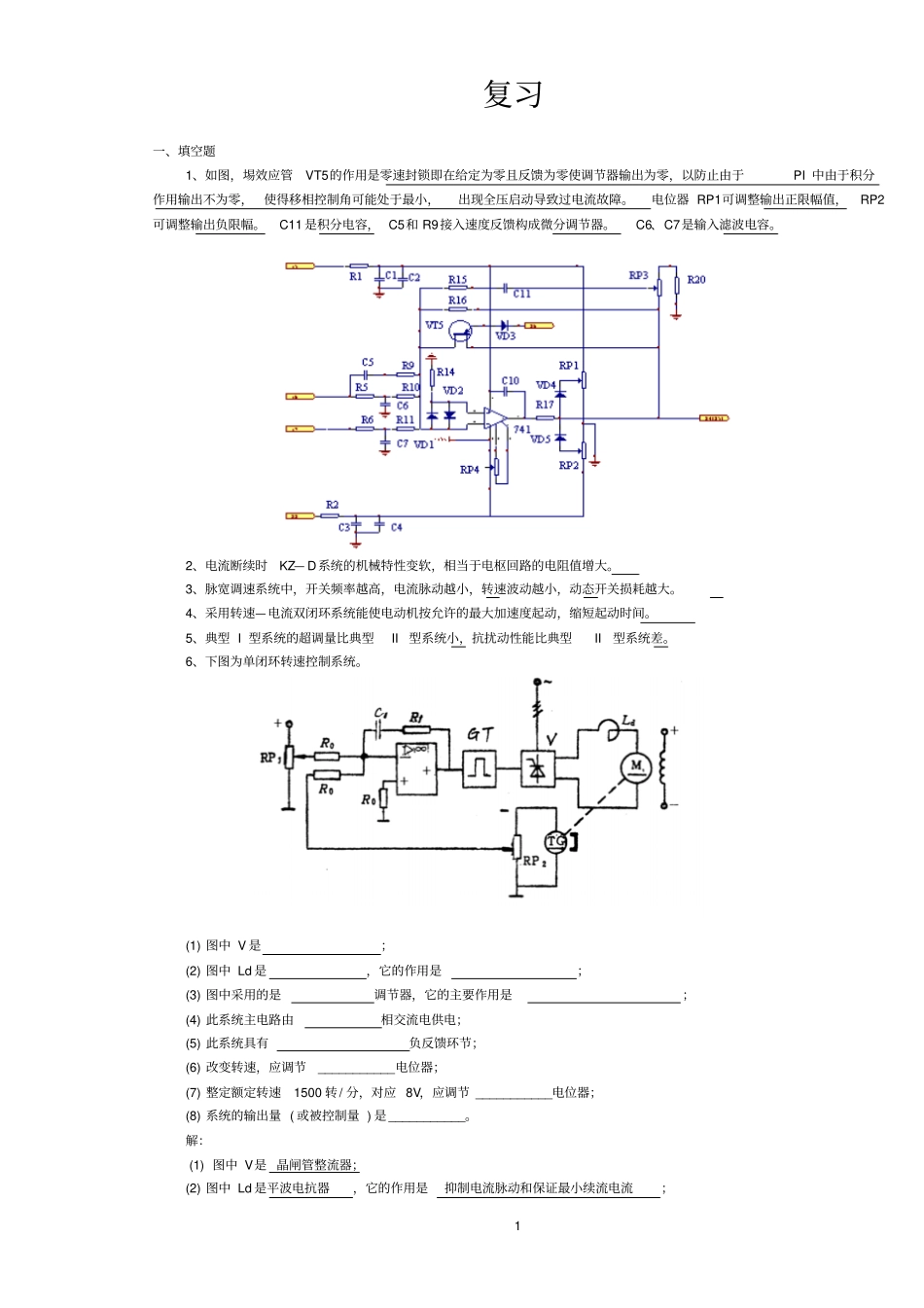
1 复习一、填空题1、如图,埸效应管VT5的作用是零速封锁即在给定为零且反馈为零使调节器输出为零,以防止由于PI 中由于积分作用输出不为零,使得移相控制角可能处于最小,出现全压启动导致过电流故障
电位器 RP1可调整输出正限幅值,RP2可调整输出负限幅
C11 是积分电容, C5和 R9接入速度反馈构成微分调节器
C6、C7是输入滤波电容
2、电流断续时KZ— D系统的机械特性变软,相当于电枢回路的电阻值增大
3、脉宽调速系统中,开关频率越高,电流脉动越小,转速波动越小,动态开关损耗越大
4、采用转速—电流双闭环系统能使电动机按允许的最大加速度起动,缩短起动时间
5、典型 I 型系统的超调量比典型II型系统小,抗扰动性能比典型II型系统差
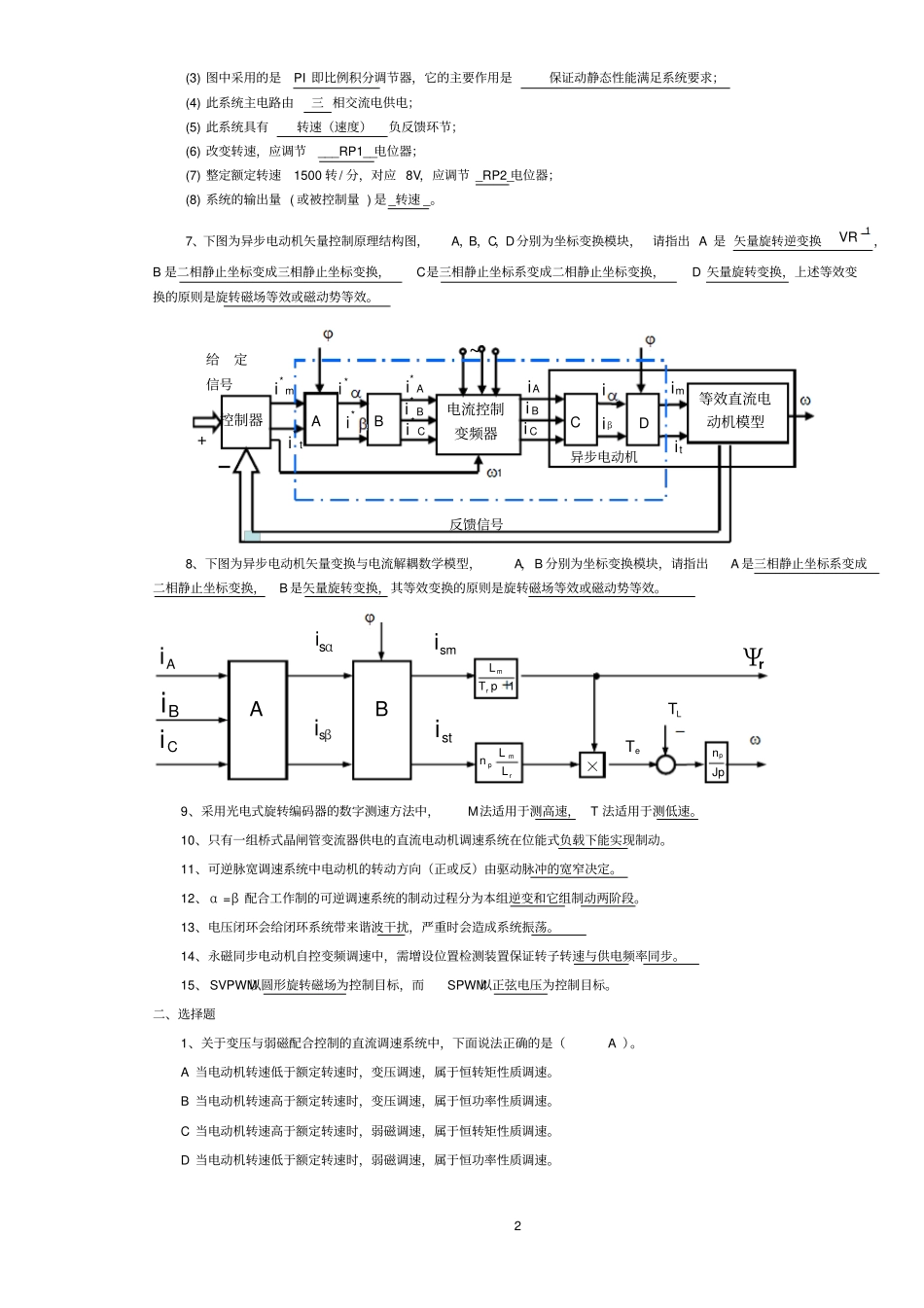
6、下图为单闭环转速控制系统
(1) 图中 V 是;(2) 图中 Ld 是,它的作用是;(3) 图中采用的是调节器,它的主要作用是;(4) 此系统主电路由相交流电供电;(5) 此系统具有负反馈环节;(6) 改变转速,应调节___________电位器;(7) 整定额定转速1500 转 / 分,对应 8V,应调节 ___________电位器;(8) 系统的输出量 ( 或被控制量 ) 是 ___________
解: (1) 图中 V是 晶闸管整流器;(2) 图中 Ld 是平波电抗器,它的作用是抑制电流脉动和保证最小续流电流;2 (3) 图中采用的是PI 即比例积分调节器,它的主要作用是保证动静态性能满足系统要求;(4) 此系统主电路由三 相交流电供电;(5) 此系统具有转速(速度)负反馈环节;(6) 改变转速,应调节___RP1__电位器;(7) 整定额定转速1500 转 / 分,对应 8V,应调节 _RP2_电位器;(8) 系统的输出量 ( 或被控制量 ) 是 _转速 _
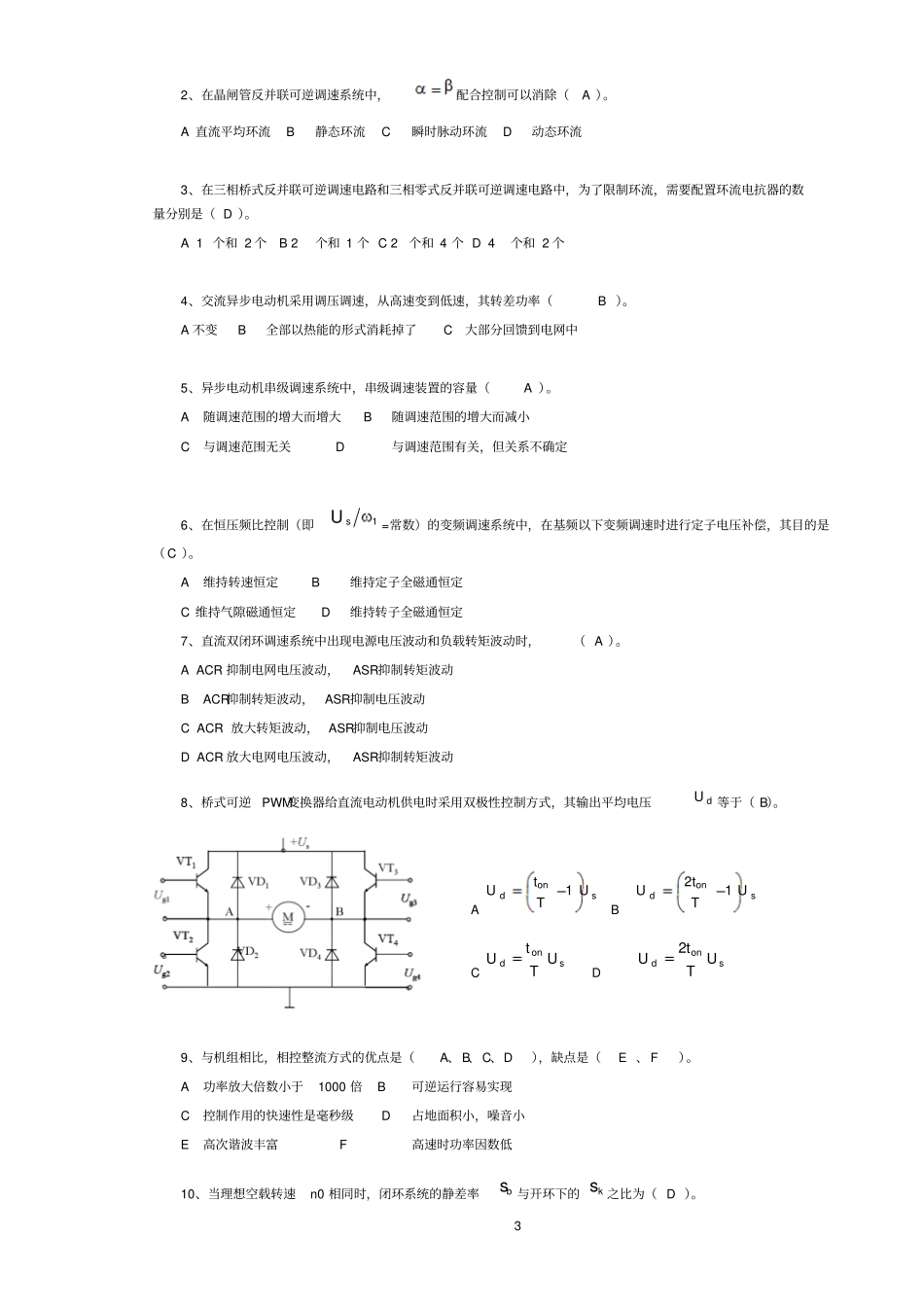
7、下图为异步电动机矢量控制原理结构图,A,B,C,D分别为坐标