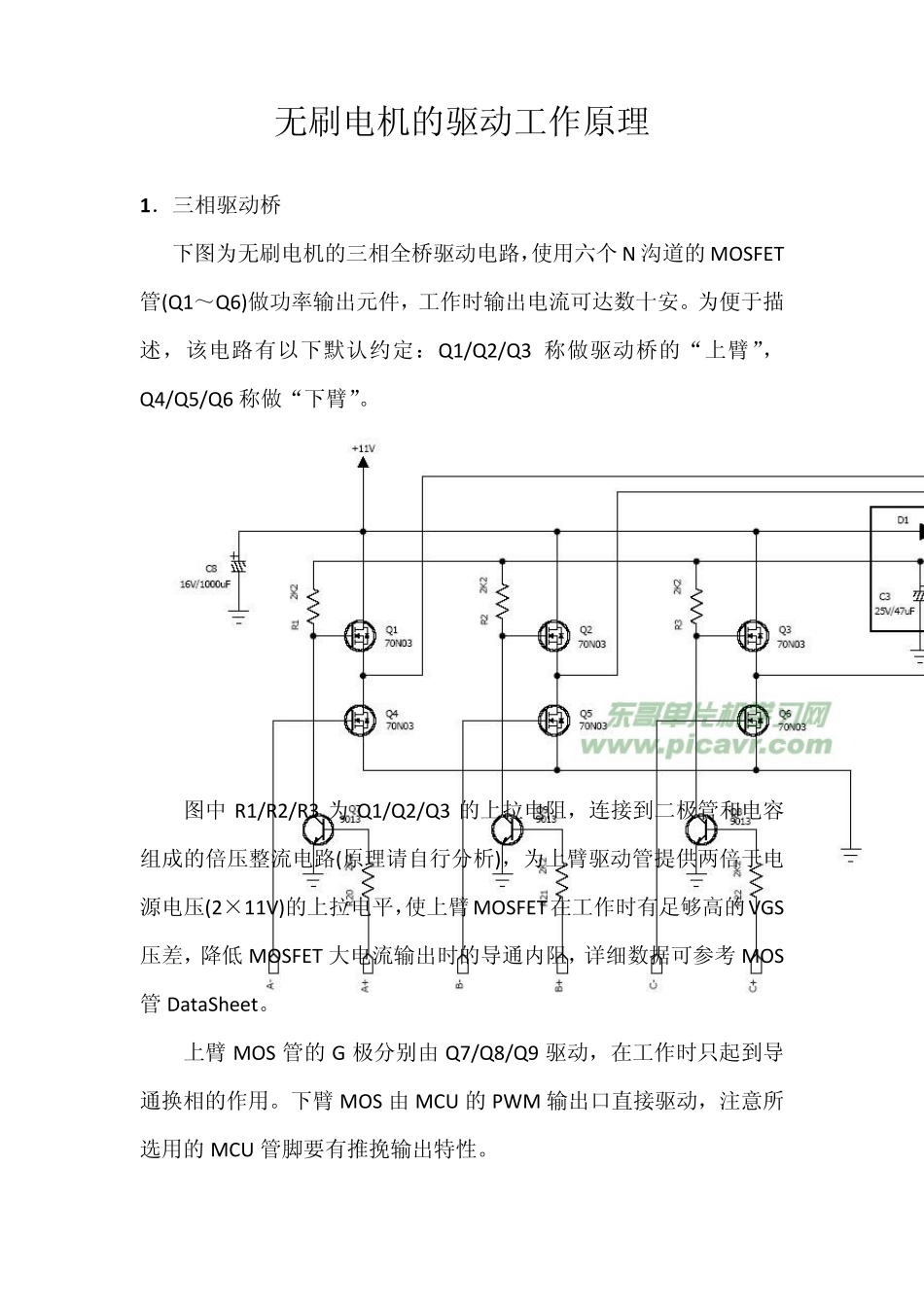
无刷电机的驱动工作原理 1.三相驱动桥 下图为无刷电机的三相全桥驱动电路,使用六个N 沟道的MOSFET管(Q1~Q6)做功率输出元件,工作时输出电流可达数十安
为便于描述,该电路有以下默认约定:Q1/Q2/Q3 称做驱动桥的“上臂”,Q4/Q5/Q6 称做“下臂”
图中R1/R2/R3 为Q1/Q2/Q3 的上拉电阻,连接到二极管和电容组成的倍压整流电路(原理请自行分析),为上臂驱动管提供两倍于电源电压(2×11V)的上拉电平,使上臂MOSFET在工作时有足够高的VGS压差,降低 MOSFET 大电流输出时的导通内阻,详细数据可参考 MOS管DataSheet
上臂MOS 管的G 极分别由 Q7/Q8/Q9 驱动,在工作时只起到导通换相的作用
下臂MOS 由 MCU 的PWM 输出口直接驱动,注意所选用的MCU 管脚要有推挽输出特性
驱动桥全部选用N 沟道MOSFET 的好处: 大电流N 沟道MOS 可供选择的型号众多,货源充足便于购买,使用的MOSFET 类型减少,间接降低采购元件的难度
在图 1 中,上臂 MOS 管经过 Q7/Q8/Q9 驱动,逻辑电平和下臂 MOS刚好相反,这样的好处是,MCU 上电时 I/O 默认为 1,上臂 MOS 不会导通
只有下臂 MOS 导通,因此不会有电流经过驱动桥,消除了潜在电路隐患
C8 是整个电调的电源滤波电容,使用中一定要接上,否则无刷电机的反电动势叠加在电源上不能被滤除,由倍压电路整流后的电压高达 30V 左右,己接近 MOSFET 的VGS 上限,可能会损坏 MOSFET
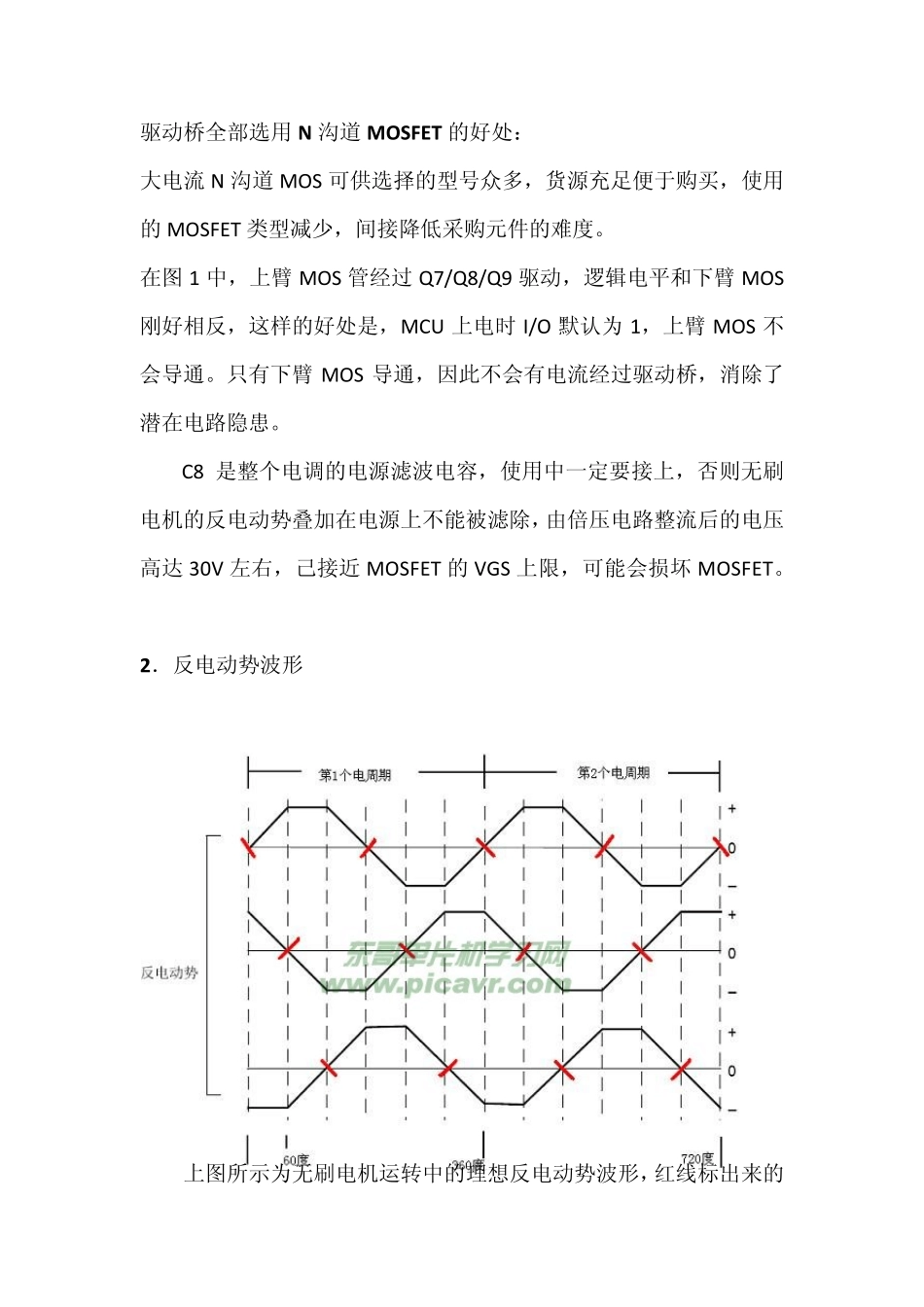
2.反电动势波形 上图所示为无刷电机运转中的理想反电动势波形,红线标出来的是反电动势的过零点
两个虚线间是60 度电气角度,不要理解成电机的机械角度
常用航模电机属于无刷三相六拍电机,每个电周期有六个状态
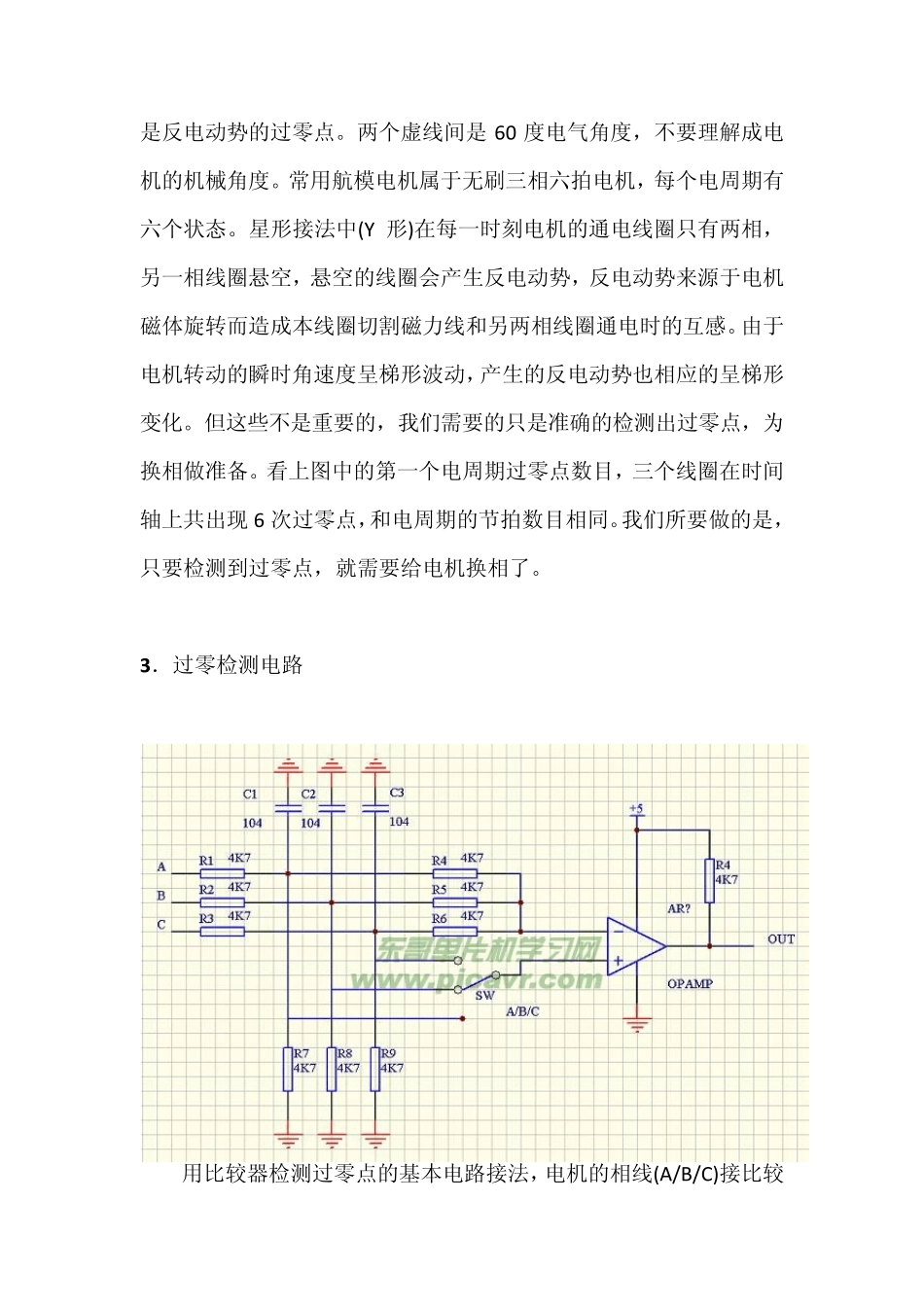
星形接法中(Y 形)在每一时刻电机的通