ABB[a]-ZH-9ABB搬运工作站9
1 任务目标➢了解工业机器人搬运工作站布局
➢学会搬运常用 I/O 配置
➢学会程序数据创建
➢学会目标点示教
➢学会程序调试
➢学会搬运程序编写
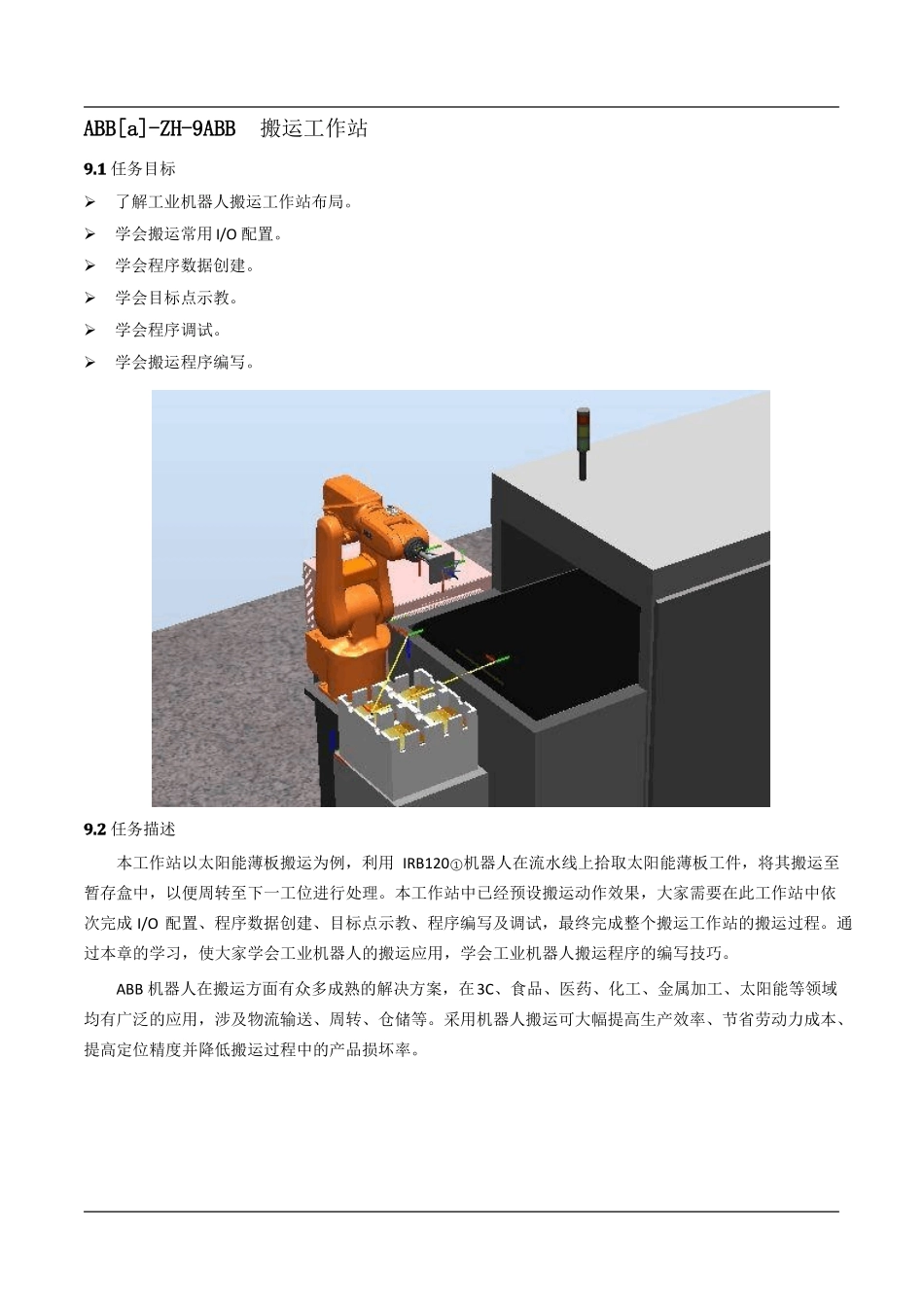
2 任务描述本工作站以太阳能薄板搬运为例,利用 IRB120①机器人在流水线上拾取太阳能薄板工件,将其搬运至暂存盒中,以便周转至下一工位进行处理
本工作站中已经预设搬运动作效果,大家需要在此工作站中依次完成 I/O 配置、程序数据创建、目标点示教、程序编写及调试,最终完成整个搬运工作站的搬运过程
通过本章的学习,使大家学会工业机器人的搬运应用,学会工业机器人搬运程序的编写技巧
ABB 机器人在搬运方面有众多成熟的解决方案,在3C、食品、医药、化工、金属加工、太阳能等领域均有广泛的应用,涉及物流输送、周转、仓储等
采用机器人搬运可大幅提高生产效率、节省劳动力成本、提高定位精度并降低搬运过程中的产品损坏率
ABB 推出的一款迄今为止最小的多用途工业机器人——紧凑、敏捷、轻量的六轴 IRB120,仅重 25kg,荷重 3kg(垂直腕为 4kg),工作范围达 580mm
3知识储备9
1RobotStudio知识准备1
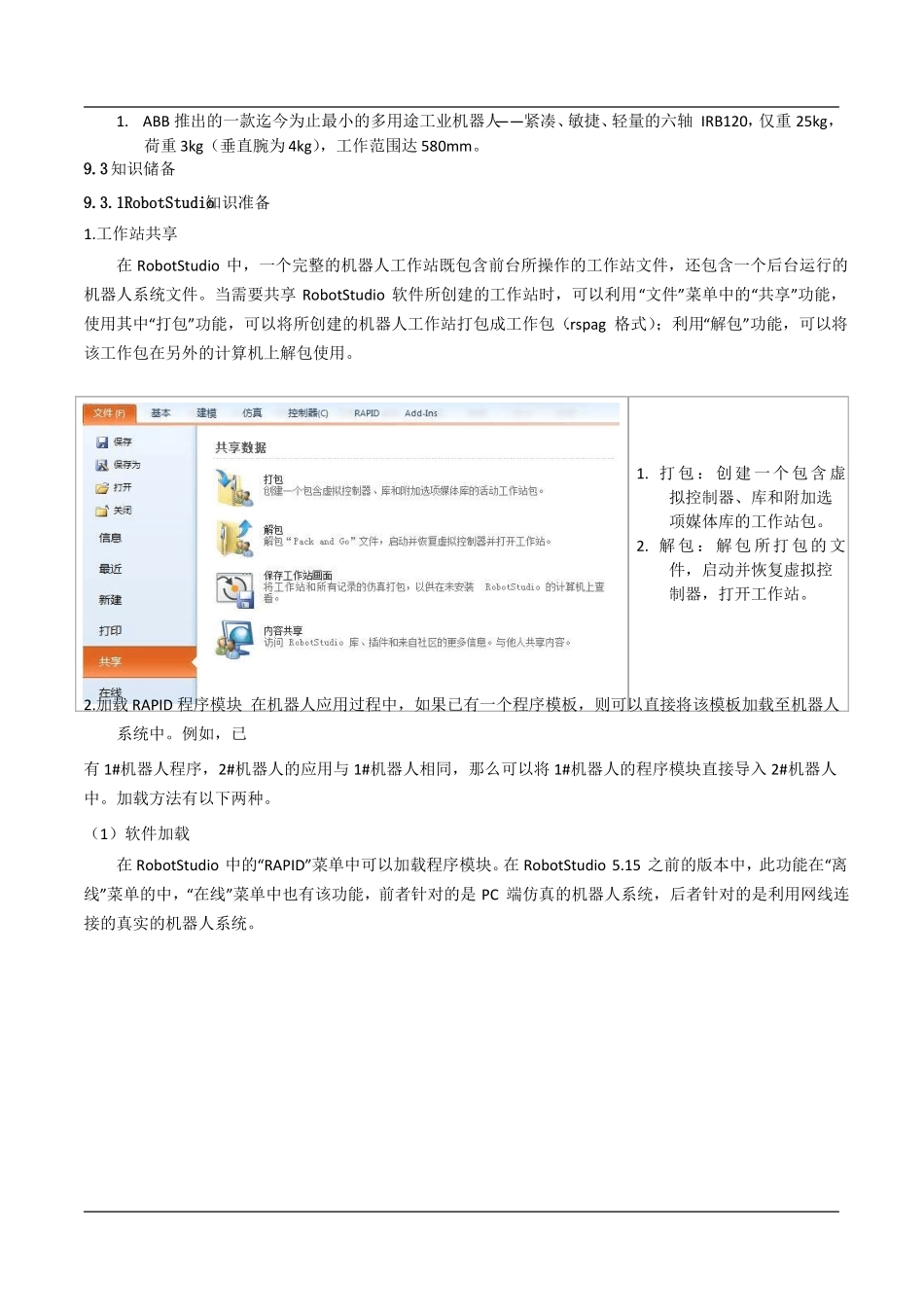
工作站共享在 RobotStudio 中,一个完整的机器人工作站既包含前台所操作的工作站文件,还包含一个后台运行的机器人系统文件
当需要共享 RobotStudio 软件所创建的工作站时,可以利用“文件”菜单中的“共享”功能,使用其中“打包”功能,可以将所创建的机器人工作站打包成工作包(
rspag 格式);利用“解包”功能,可以将该工作包在另外的计算机上解包使用
打 包 :创 建 一个 包含 虚拟控制器、库和附加选项媒体库的工作站包
解 包 :解 包 所打 包的 文件,启动并恢复虚拟控制器,打开工作站
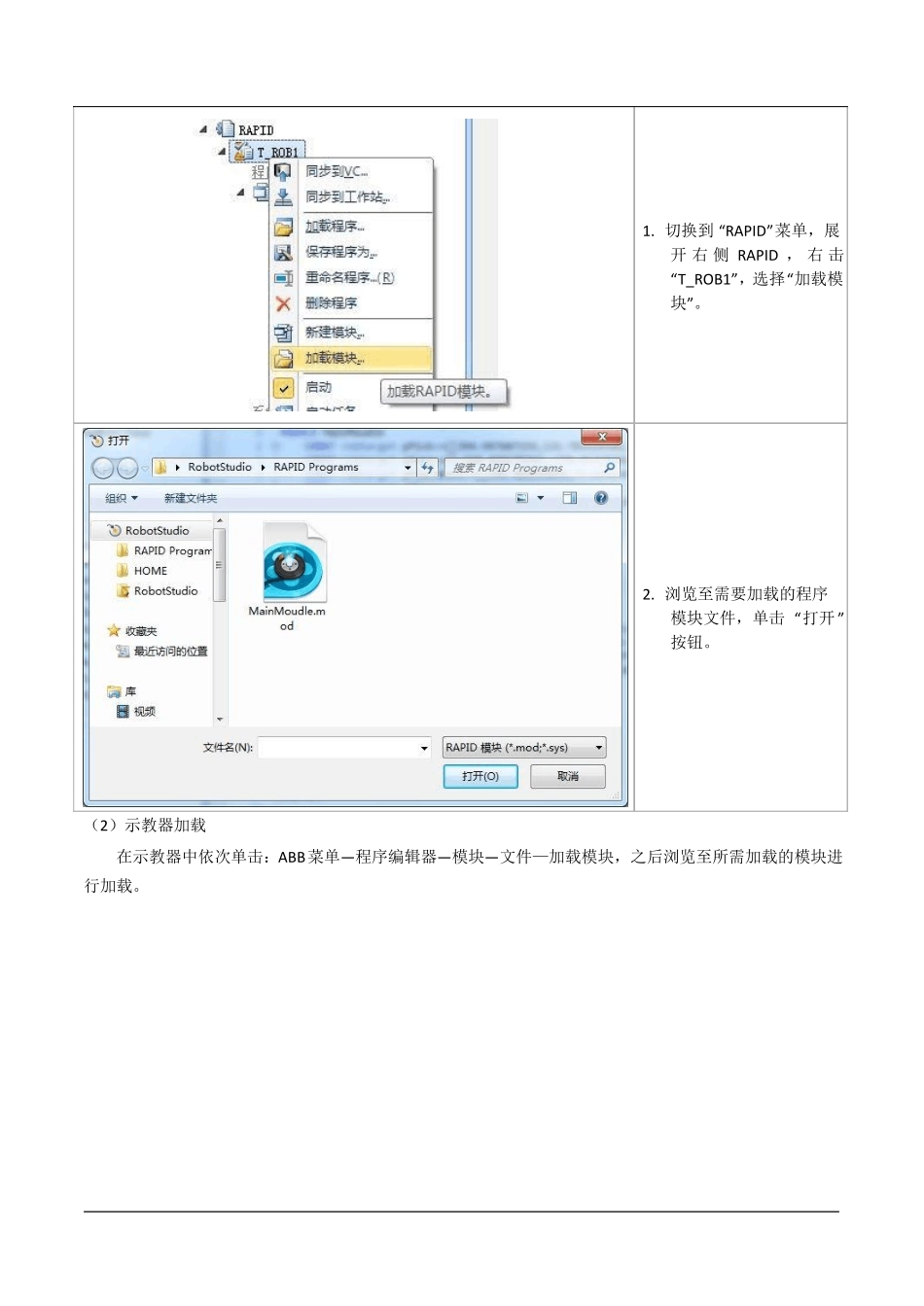
加载 RAPID 程序模块 在机器人应用过程