PLC 简单案例讲解——机器人周边设备控制一、设计思路1、用 PLC 控制一维运动平台实现电机的自动正反转运行及手动正反转运行;2、一维运动平台的行程两端各有一行程开关,分别定义为正向限位和负向限位;3、在电机自动正反转运行前,需对电机进行复位
复位的过程是:启动电机往负向运行,运行至负向限位后,往正向运行一段距离,将该位置作为电机自动正反转运行的初始位置;4、复位完成后,按下正转按钮,电机往正向运行一段距离(该距离通过运动包络参数设定),到位后停止
按下反转按钮,电机往负向运行一段距离,到位后停止;5、如正反转运行过程中,触动行程开关,电机停止运行
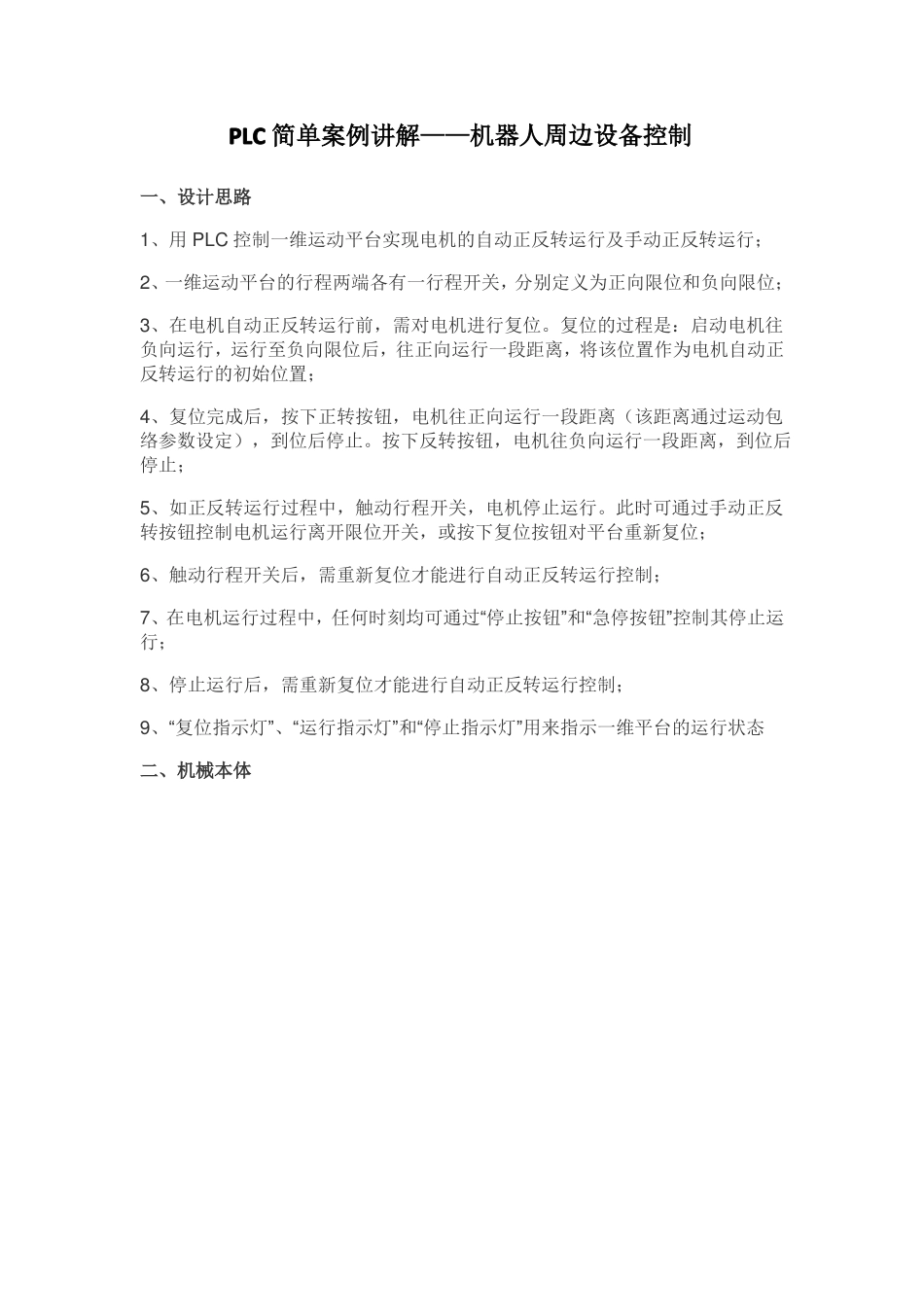
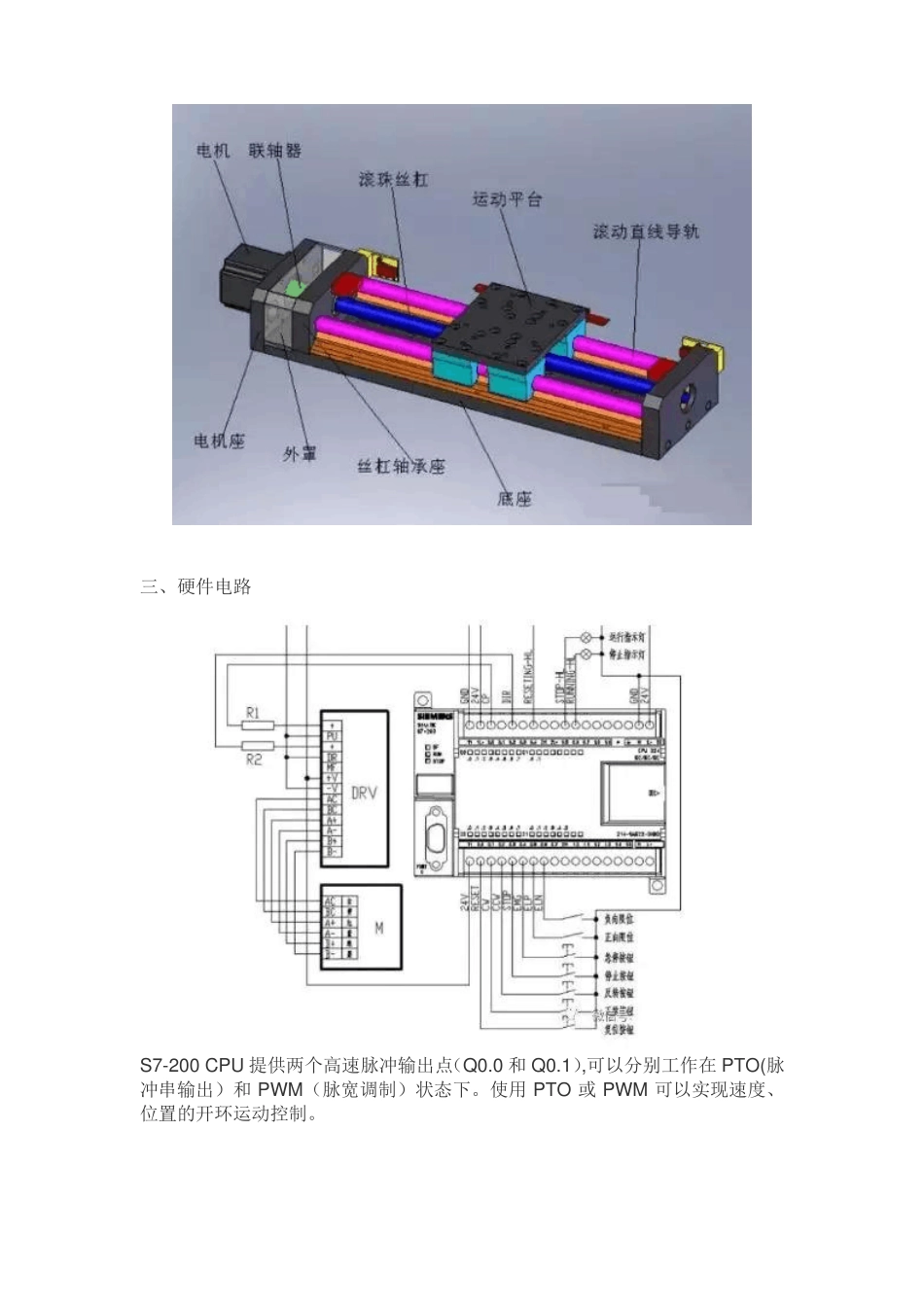
此时可通过手动正反转按钮控制电机运行离开限位开关,或按下复位按钮对平台重新复位;6、触动行程开关后,需重新复位才能进行自动正反转运行控制;7、在电机运行过程中,任何时刻均可通过“停止按钮”和“急停按钮”控制其停止运行;8、停止运行后,需重新复位才能进行自动正反转运行控制;9、“复位指示灯”、“运行指示灯”和“停止指示灯”用来指示一维平台的运行状态二、机械本体三、硬件电路S7-200 CPU 提供两个高速脉冲输出点(Q0
0 和 Q0
1),可以分别工作在 PTO(脉冲串输出)和 PWM(脉宽调制)状态下
使用 PTO 或 PWM 可以实现速度、位置的开环运动控制
PTO 功能可以输出一串脉冲,用户可以控制脉冲的周期(频率)和个数
PWM功能可以连续输出一串占空比可调的脉冲,用户可以控制脉冲的周期和脉宽(占空比)
高速脉冲输出点和普通数字量输出点共用输出映像 Q0
0 和 Q0
1 上激活 PTO 或 PWM 功能时,PTO/PWM 发生器对输出拥有控制权,输出波形不受其他影响
只有晶体管输出类型的 CPU 能够支持高速脉冲输出功能
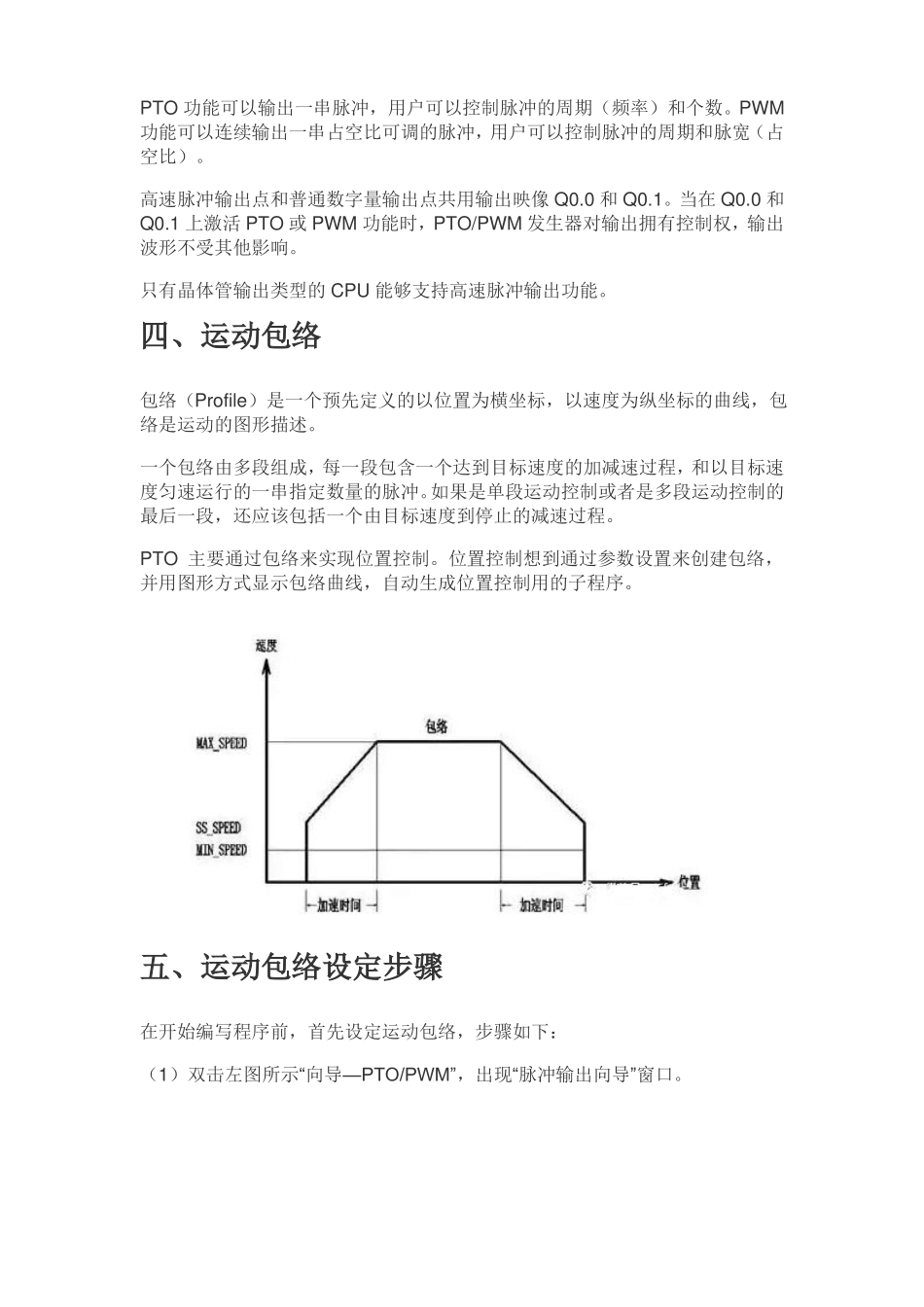
四、运动包络包络(Profile)是一个预先定义的以位置为横坐标,以