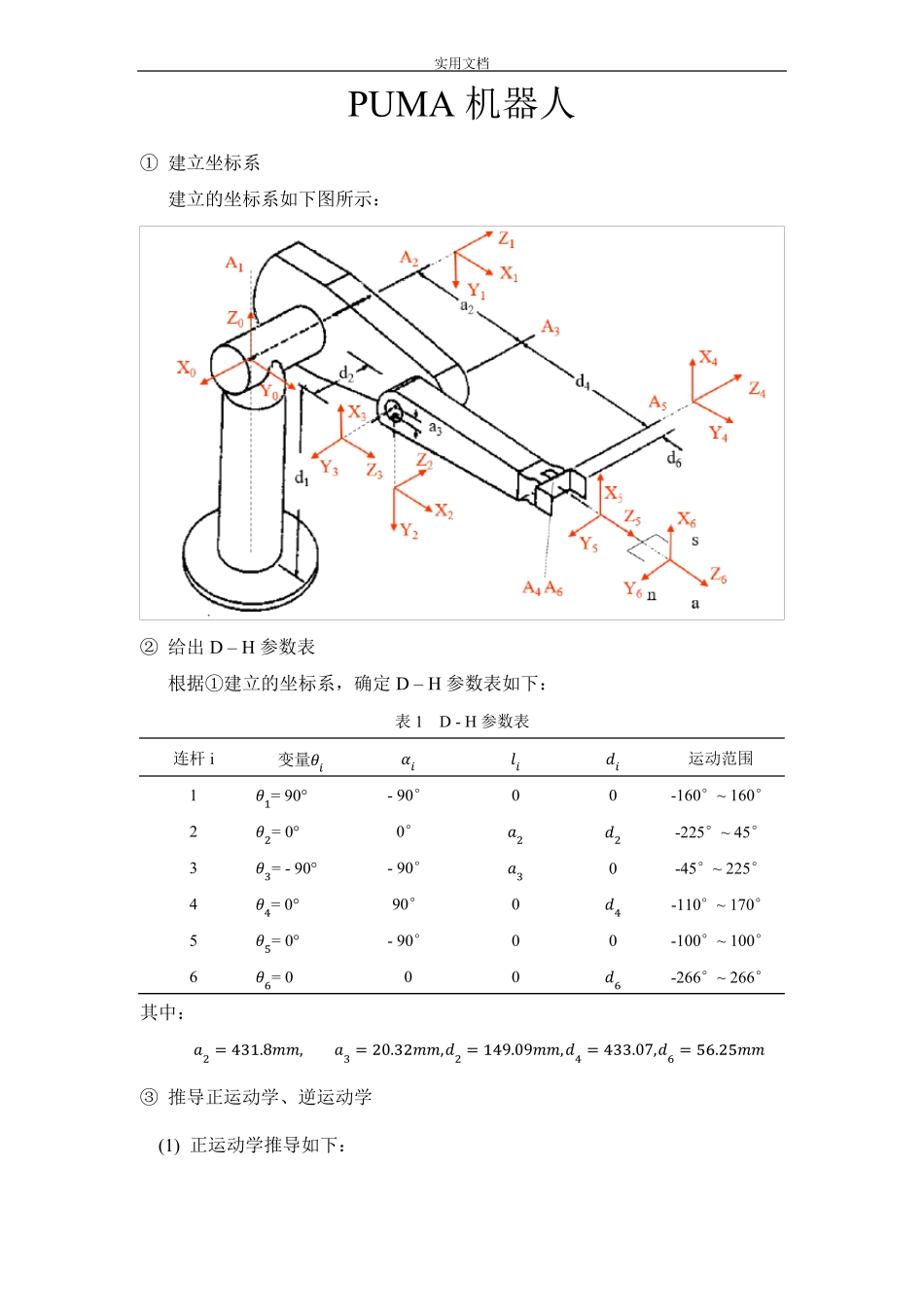
实用文档2016 年秋季学期研究生课程考核(读书报告、研究报告)考核科目:机 器 人 技 术学生所在院(系):机 电 工 程 学 院学 生 所 在 学 科:学生姓名:学号:学生类别:考核结果机 械 设 计 及 理 论阅 卷 人实用文档PUMA 机器人① 建立坐标系建立的坐标系如下图所示:② 给出 D – H 参数表根据①建立的坐标系,确定 D – H 参数表如下:表 1D - H 参数表连杆 i123456变量𝜃𝑖𝜃1= 90°𝜃2= 0°𝜃3= - 90°𝜃4= 0°𝜃5= 0°𝜃6= 0𝛼𝑖- 90°0°- 90°90°- 90°0𝑙𝑖0𝑎2𝑎3000𝑑𝑖0𝑑20𝑑40𝑑6运动范围-160°~ 160°-225°~ 45°-45°~ 225°-110°~ 170°-100°~ 100°-266°~ 266°其中:𝑎2 = 431
8𝑚𝑚,𝑎3 = 20
32𝑚𝑚,𝑑2 = 149
09𝑚𝑚,𝑑4 = 433
07,𝑑6 = 56
25𝑚𝑚③ 推导正运动学、逆运动学(1) 正运动学推导如下:实用文档根据坐标系建立的原则,可以通过旋转和位移建立相邻的坐标系𝑂 𝑖1 和𝑂𝑖的间的关系:1) 将𝑋 𝑖1 轴绕𝑍 𝑖1 轴转𝜃 𝑖 角度,将其与𝑋 𝑖 轴平行;2) 沿𝑍 𝑖1轴平移距离𝑑 𝑖,使𝑋 𝑖1 与𝑋 𝑖 轴重合;3) 沿𝑋 𝑖 轴平移距离𝑙 𝑖 ,使两坐标系的原点和 X 轴重合;4) 绕𝑋 𝑖 轴旋转𝛼 𝑖 角度,两坐标系完全重合
最终得到如下公式:𝑖1𝑖𝑇 = 𝑅(𝑍𝑖1 , 𝜃𝑖)𝑇𝑟𝑎𝑛𝑠(𝑍 𝑖1 , 𝑑 𝑖)𝑇𝑟𝑎𝑛𝑠(𝑋𝑖, 𝑙𝑖)𝑅(𝑋 𝑖, 𝛼𝑖)(1)cos𝜃𝑖𝑐𝑜𝑠𝛼𝑖𝑠𝑖𝑛𝜃𝑖𝑠𝑖𝑛𝜃𝑖𝑐𝑜𝑠𝛼𝑖𝑐𝑜𝑠𝜃𝑖𝑖1 𝑇 =𝑖0𝑠𝑖𝑛𝛼𝑖00𝑠𝑖𝑛𝛼𝑖𝑠𝑖𝑛𝜃𝑖𝑙 𝑖𝑐𝑜𝑠𝜃𝑖𝑠𝑖𝑛𝛼𝑖𝑐𝑜𝑠𝜃𝑖𝑙𝑖𝑠𝑖𝑛𝜃𝑖𝑐𝑜𝑠𝛼𝑖𝑑𝑖01通过计算得:根据式 (1)