1/9摄影测量(一)一、填空题(20 分,每空 1 分)1、摄影测量中常用的坐标系有、、、、
2、解求单张像片的外方位元素最少需要个点
3、GPS 辅助空中三角测量的作用是
4、两个空间直角坐标系间的坐标变换最少需要个和个地面控制点
5、摄影测量加密按平差范围可分为、和三种方法
6、摄影测量的发展经历了、和三个阶段
7、恢复立体像对左右像片的相互位置关系依据的是方程
8、法方程消元的通式为 Ni,i+1=
二、名词解释(20 分,每个 4 分)1、内部可靠性:2、绝对定向元素:3、像主点:4、带状法方程系数矩阵的带宽:5、自检校光束法区域网平差:三、简答题(45 分,每题 15 分)1、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,并简要叙述其在摄影测量中的主要用途
2、像片外方位元素的作用是什么
用图示意以 y 轴为主轴的航摄像片的外方位元素
3、如果拥有一套 POS 系统,你打算如何用其快速确定地面点的三维坐标(简要叙述基本思想和具体解算过程)
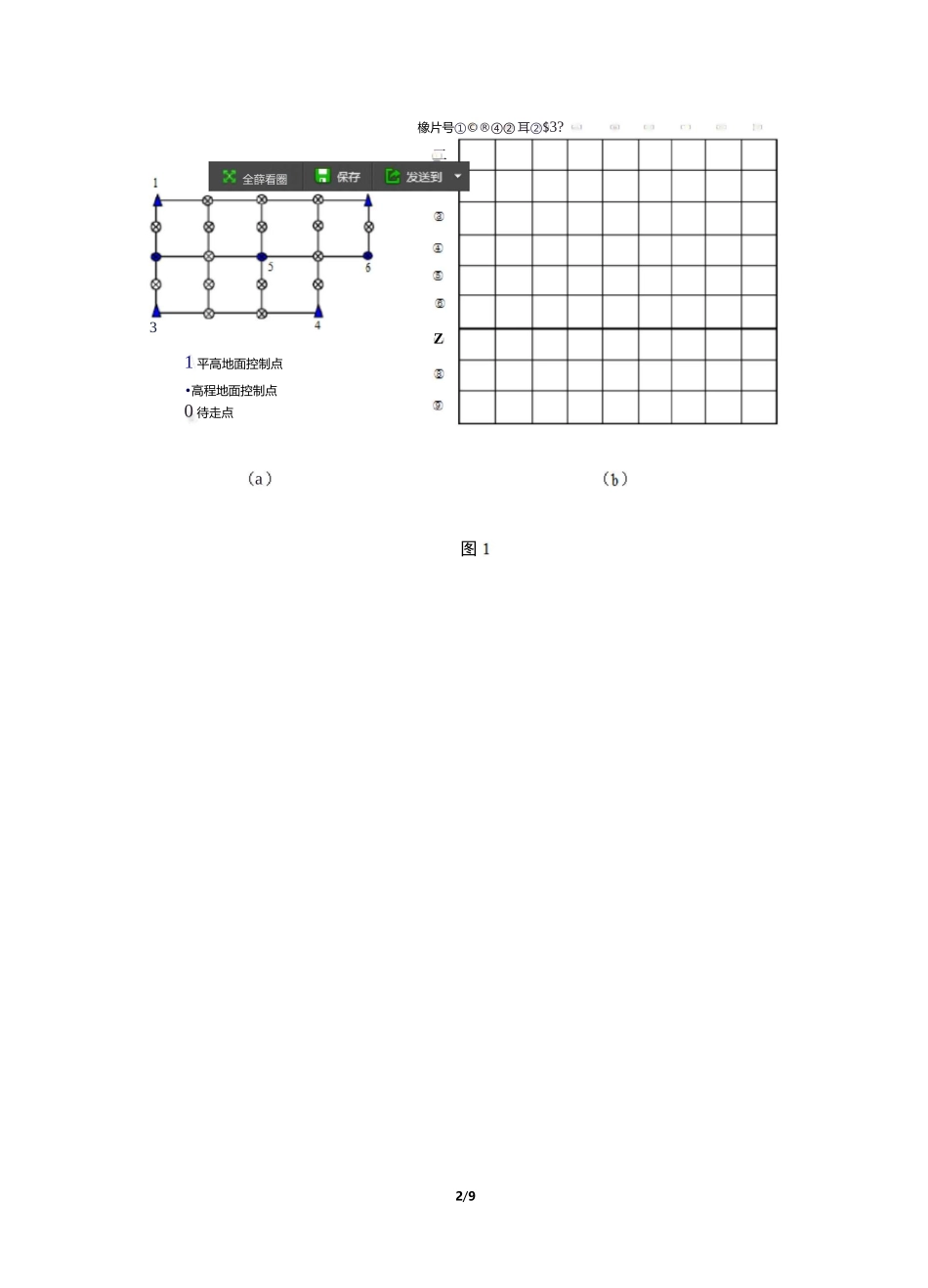
四、综合题(15 分)设某区域由两条航线组成(如图 1 所示),试根据光束法区域网平差原理回答下列问题① 当控制点无误差时,观测值个数 n、未知数个数 t、多余观测数 r;② 按最小带宽原则在图 a 中标出像片排列顺序号并求出带宽;③ 在图 b 中绘出改化法方程系数矩阵结构图(保留像片外方位元素)
2/9二3Za图全薛看圏橡片号①©®④② 耳②$3
1 平高地面控制点•高程地面控制点0 待走点3/9摄影测量(二)一、名词解释1 摄影测量学2 航向重叠3 单像空间后方交会4 相对行高5 像片纠正6 解析空中三角测量7 透视平面旋转定律8 外方位元素9 核面10 绝对定向元素二、填空1 摄影测量的基本问题,就是将转换为
2 物体的色是随着的光谱成分和物体对光谱成分固有不变的、、和的能力而定的
3 人眼产生天然立体