342 第九章 非线性控制系统 前面各章阐述了线性定常系统的分析与综合
严格来说,理想的线性系统是不存在的,总会有一些非线性因素
前面各章的系统是进行线性化处理后近似当作线性系统来研究的,从而可以用线性控制理论对系统进行分析和研究
但是,并不是所有的非线性系统都可以进行线性化处理,对于某些不能进行线性化处理的系统,称为本质非线性控制系统
非线性控制系统与线性控制系统最重要的区别在于非线性控制系统不满足叠加原理,且系统的响应与初始状态有关
因此,前面各章用于分析线性控制系统的有效方法,不能直接用于非线性控制系统
到目前为止,对非线性控制系统的分析研究,没有一种象线性控制系统那样普遍适用的方法
已有的方法,在应用上都有一定的局限性
所以对某类非线性控制系统,必须考虑相应的分析和设计方法
本章先介绍自动控制系统中常见的典型非线性特性,在此基础上介绍分析非线性控制系统的常用两种方法—描述函数法和相平面法
第一节 非线性控制系统概述 实际控制系统中,非线性特性有很多类型,下面只介绍几种常见典型非线性特性
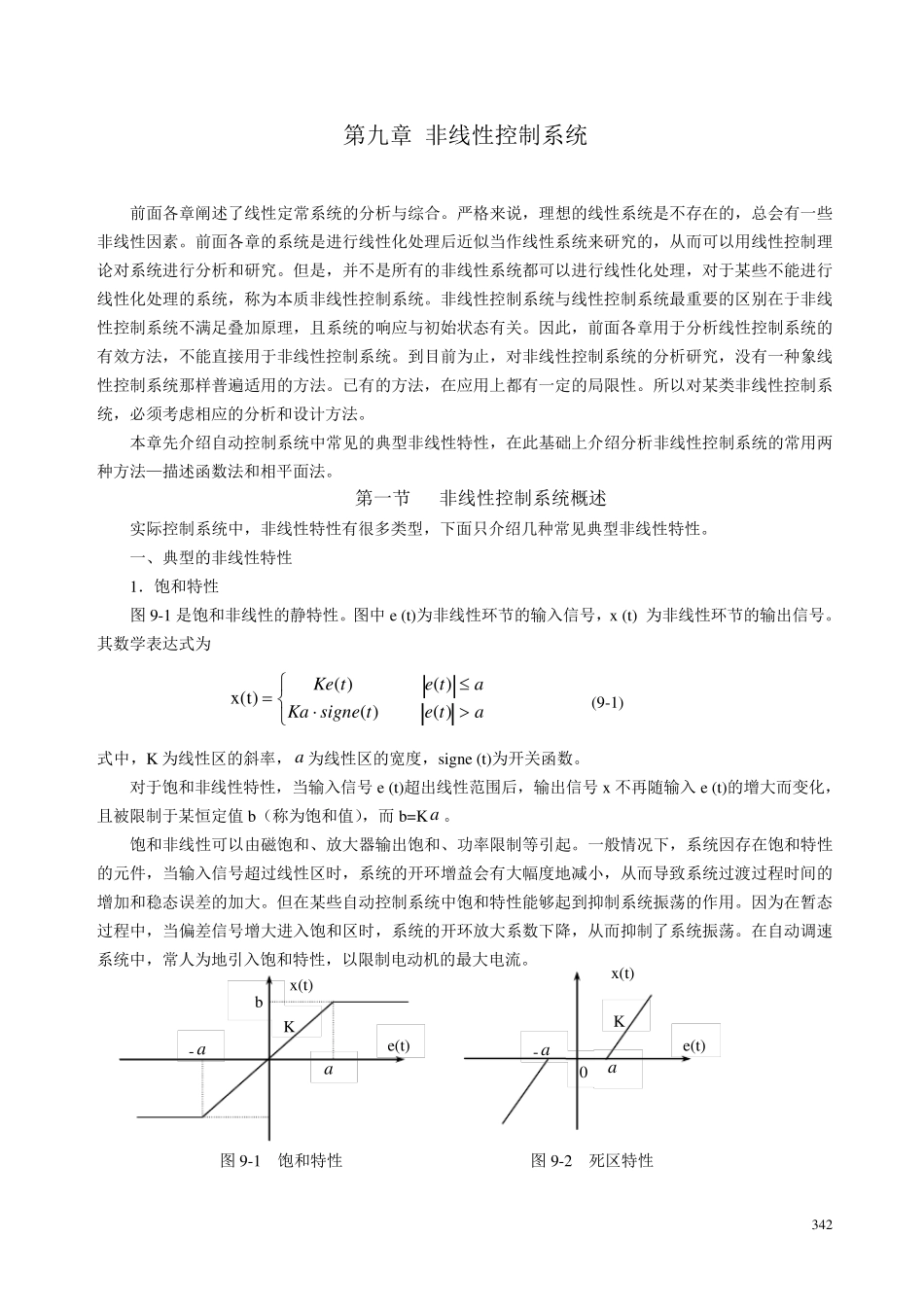
一、典型的非线性特性 1.饱和特性 图 9-1 是饱和非线性的静特性
图中 e (t)为非线性环节的输入信号,x (t) 为非线性环节的输出信号
其数学表达式为 atetsigneKaatetKe)()()()(x (t) 式中,K 为线性区的斜率, a 为线性区的宽度,signe (t)为开关函数
对于饱和非线性特性,当输入信号 e (t)超出线性范围后,输出信号 x 不再随输入 e (t)的增大而变化,且被限制于某恒定值 b(称为饱和值),而 b=Ka
饱和非线性可以由磁饱和、放大器输出饱和、功率限制等引起
一般情况下,系统因存在饱和特性的元件,当输入信号超过线性区时,系统的开环增益会有大幅度地减小,从而导致系统过渡过程时间的增加和稳态误差的加大