EPSON机械手培训(中级)一、控制器操作二、机器人管理器操作三、程序操作四、常用指令介绍内容内容一、控制器操作1
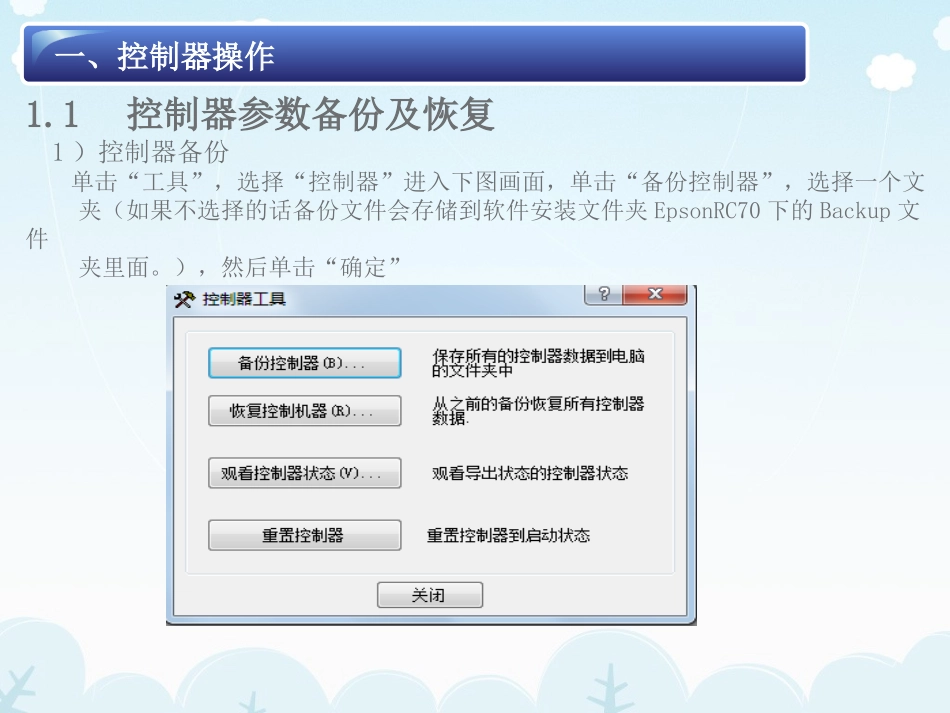
1控制器参数备份及恢复1)控制器备份单击“工具”,选择“控制器”进入下图画面,单击“备份控制器”,选择一个文夹(如果不选择的话备份文件会存储到软件安装文件夹EpsonRC70下的Backup文件夹里面
),然后单击“确定”一、控制器操作2)控制器恢复单击“工具”,选择“控制器”进入下图画面,单击“恢复控制器”,选择之前备份的文件,然后单击“确定”
(不能将不同控制器版本的备份文件恢复到控制器,例如将RC90控制器的备份文件恢复到RC90700控制器)一、控制器操作1
1设置控制器参数1)设置控制器IP地址单击“设置”,选择“系统配置”进入左下图画面
单击“控制器”选择“配置”进入右下图画面
设置好控制器IP地址后,单击“应用”,单击“关闭”,如果提示重置控制器,单击“确定”一、控制器操作1
2设置控制器参数2)修改I/O设置单击“设置”,选择“系统配置”,单击“控制器”,选择“远程控制”进入下图画面
如果将专用输入输出设置为“空闲”即可将专用输入输出改为普通输入输出
也可以把其他端口号改为专用输入输出
单击“缺省”可以恢复初始设置
修改好后,单击“应用”,单击“关闭”,提示重启控制器,单击“确定”一、控制器操作1
3重置控制器单击“工具”,选择“控制器”进入左下图画面
单击“重置控制器”22、机器人管理器操作、机器人管理器操作2
1SCARA机器人工具坐标示教1)在机器人管理界面单击“工具”打开工具坐标向导画面22、机器人管理器操作、机器人管理器操作2)在“工具”画面单击“工具向导”,进入工具向导画面,选择工具编号,如下图所示:选择工具编号22、机器人管理器操作、机器人管理器操作3)单击“下一个”进入下图所示画面22、机器人管理器操作、机器人管理器操作