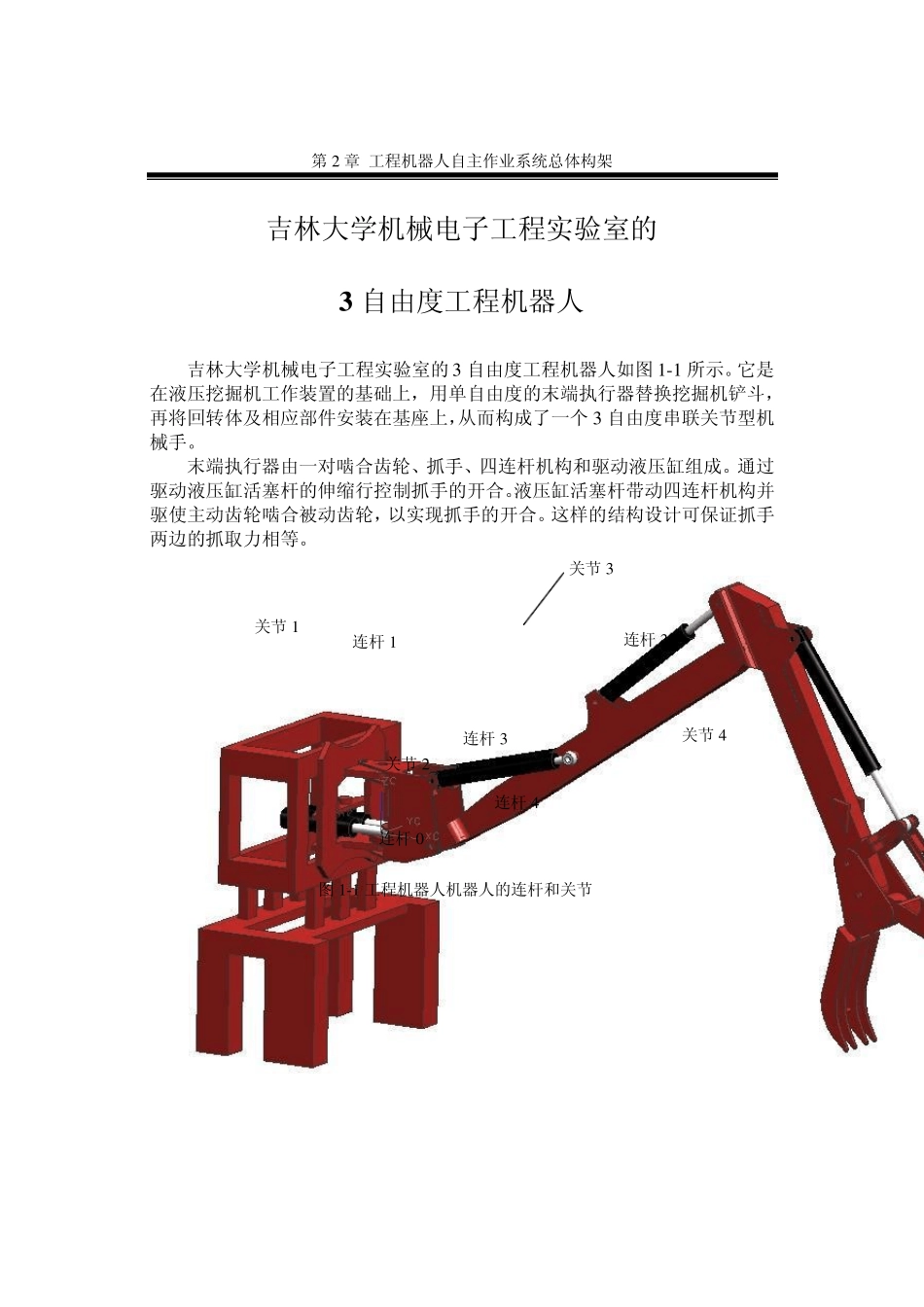
第2 章 工程机器人自主作业系统总体构架 吉林大学机械电子工程实验室的 3 自由度工程机器人 吉林大学机械电子工程实验室的3 自由度工程机器人如图1 -1 所示
它是在液压挖掘机工作装置的基础上,用单自由度的末端执行器替换挖掘机铲斗,再将回转体及相应部件安装在基座上,从而构成了一个3 自由度串联关节型机械手
末端执行器由一对啮合齿轮、抓手、四连杆机构和驱动液压缸组成
通过驱动液压缸活塞杆的伸缩行控制抓手的开合
液压缸活塞杆带动四连杆机构并驱使主动齿轮啮合被动齿轮,以实现抓手的开合
这样的结构设计可保证抓手两边的抓取力相等
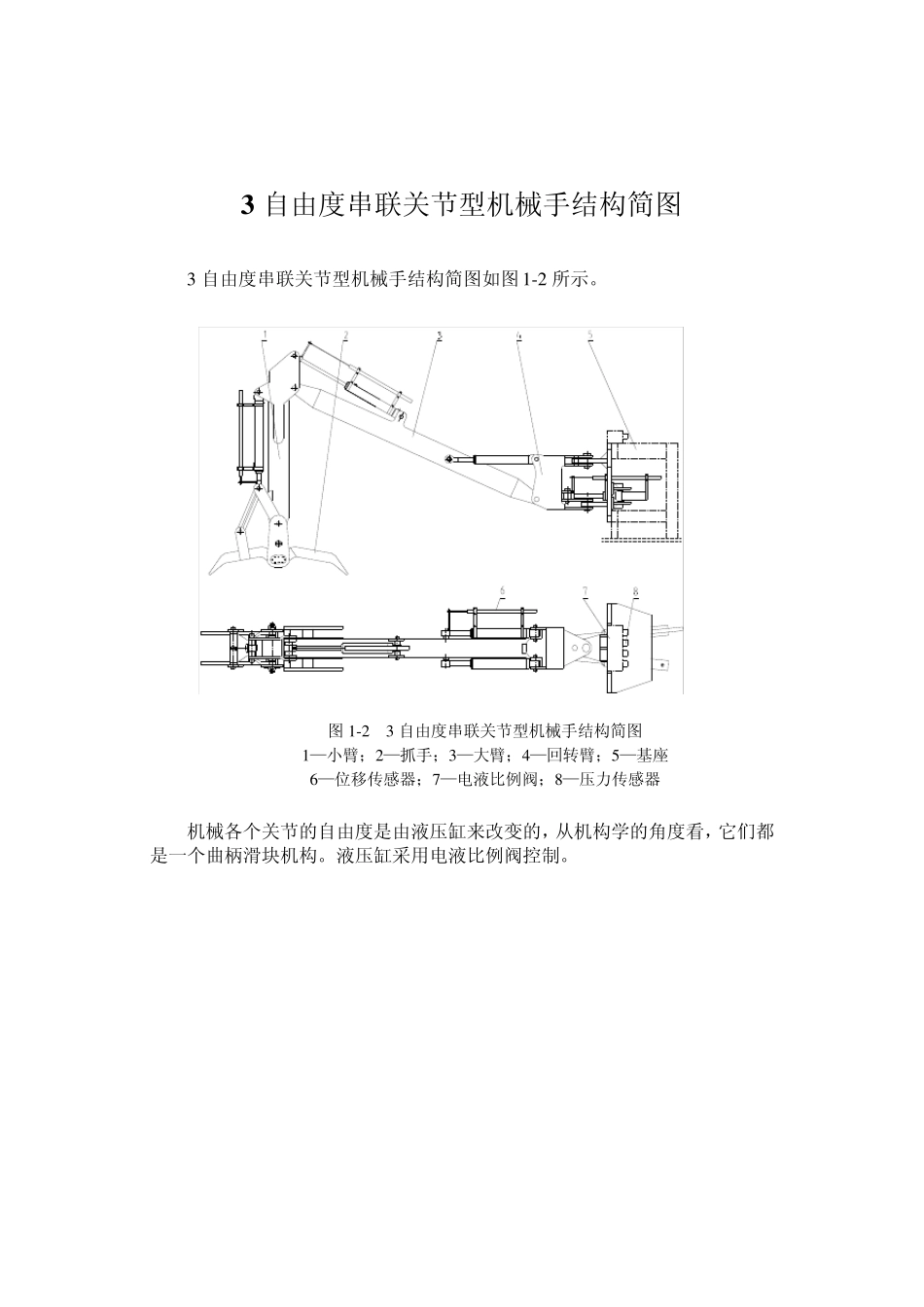
连杆 1 连杆 0 关节1 关节2 连杆 3 关节3 连杆 3 关节4 连杆 4 图1 -1 工程机器人机器人的连杆和关节 3 自由度串联关节型机械手结构简图 3 自由度串联关节型机械手结构简图如图1 -2 所示
机械各个关节的自由度是由液压缸来改变的,从机构学的角度看,它们都是一个曲柄滑块机构
液压缸采用电液比例阀控制
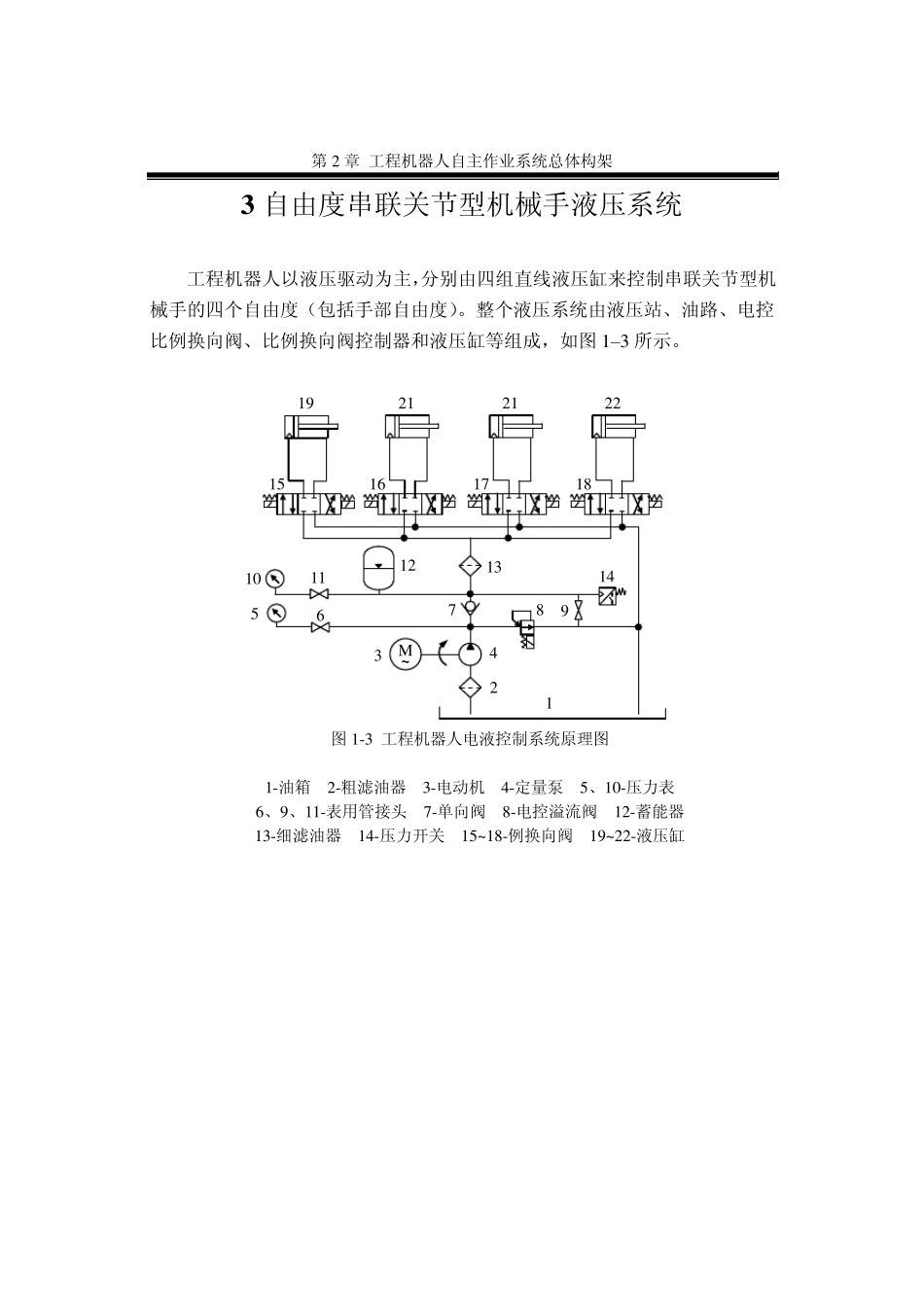
图1 -2 3 自由度串联关节型机械手结构简图 1 —小臂;2 —抓手;3 —大臂;4 —回转臂;5 —基座 6 —位移传感器;7 —电液比例阀;8 —压力传感器 第2 章 工程机器人自主作业系统总体构架 3 自由度串联关节型机械手液压系统 工程机器人以液压驱动为主,分别由四组直线液压缸来控制串联关节型机械手的四个自由度(包括手部自由度)
整个液压系统由液压站、油路、电控比例换向阀、比例换向阀控制器和液压缸等组成,如图 1–3 所示
图 1-3 工程机器人电液控制系统原理图 1-油箱 2-粗滤油器 3-电动机 4-定量泵 5、10-压力表 6、9、11-表用管接头 7-单向阀 8-电控溢流阀 12-蓄能器 13-细滤油器 14-压力开关 15~18-例换向阀 19~22-液压缸 9 4 1 2 3 5 10 6 11 7 8 1