《机械设计基础》课程教学设计 20 1 4 年 5 月 28 日案例名称第一章 平面机构分析 第三节 机构自由度计算的注意事项科目机械设...

2.5.2 空间机构的自由度计算 同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约...
单自由度振动系统固有频率及阻尼的测定实验报告一、实验目的1、 掌握测定单自由度系统固有频率、阻尼比的几种常用方法2、 掌握常用振动仪...
平面运动副及自由度的计算(3 页)Good is good, but better carries it.精益求精,善益求善。平面机构运动副自由度的计算一、运动副...
平面机构自由度计算例题及答案(6 页)Good is good, but better carries it.精益求精,善益求善。1.2. 3.精品文档,超值下载4. 5.6...
单自由度系统(自由振动)(4页)Good is good, but better carries it.精益求精,善益求善。第二章 单自由度系统的自由振动本章以阻尼...

六自由度机器人本体设计及轨迹规划与虚拟仿真(63 页)Good is good, but better carries it.精益求精,善益求善。摘 要机器人在现代...
一、填空题[1]决定机构具有确定运动得独立运动参数称为机构得__________________。[4]形成运动副得两个构件只能在一个平面内...

本科毕业设计(论文)六自由度大臂机器人2025 年 6 月六自由度大臂机器人摘 要六自由度大臂机器人采纳夹持机构进行设计.夹持机构具有刚...
第 一 章引 言机 械 工 业 就 是 国 民 得 装 备 部 , 就 是 为 国 民 经 济提 供 装 备 与 为 人 民 生 ...
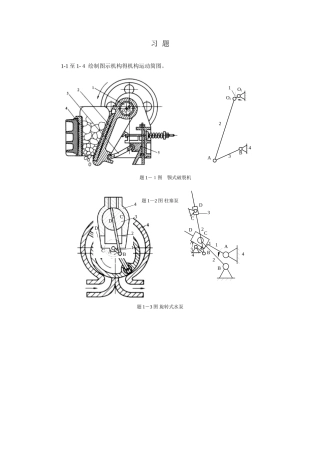
习 题1-1 至 1-4 绘制图示机构得机构运动简图。题 1-1图 颚式破裂机题 1—2 图 柱塞泵 题 1-3 图 旋转式水泵O1O2AB1234AB...
摘要本文将设计一台四自由度的机械手,它的主要的功用就是进行皮带轮间的物料传送。本文从介绍机械手出发,根据设计思路,完成了机械手的传...
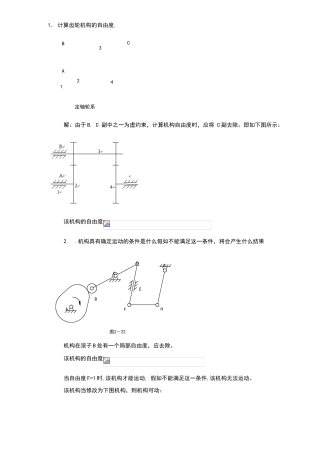
1. 计算齿轮机构的自由度. 解:由于 B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。即如下图所示:该机构的自由度2. ...
【自由度】为了确定一个运动物体的位置,所需要的独立坐标数。除单原子分子外,一般分子的运动并不只限于作平动,还有转动和分子内原子之间...
扩大权利行使自由度 保障当事人上诉权 诉权是当事人获得司法救济、实现权利的前提和基础。在民事上诉制度方面,如何保障当事人充分行使上...
四自由度多用途气动机器人(机器手)结构设计及控制实现近几十年,随着全球科学技术的快速进展和信息化水平不断提高,出于解放劳动力、提高...
工学硕士学位论文高维法律规范形理论及其在多自由度非线性机械系统中的应用 北京工业大学2024 年 5 月摘 要 在中小跨径及一般大跨径...
1 前言1.1 设计背景与意义1.1.1 焊接机器人概述焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。工业机器人是一种多用途的、可重...
摘 要为了提高生产效率和焊接质量,满足特定的工作要求,本题设计用于焊接的关节型机器人的手腕和末端执行器。根据机器人的工作要求进行了...
多自由度直角坐标型码垛机器人本体结构设计Body structure design of rectangular coordinate palletizing robot with the multi...