平面运动副及自由度的计算(3 页)Good is good, but better carries it
精益求精,善益求善
平面机构运动副自由度的计算一、运动副的分类根据运动副中两构接触形式不同,运动副可分为低副和高副
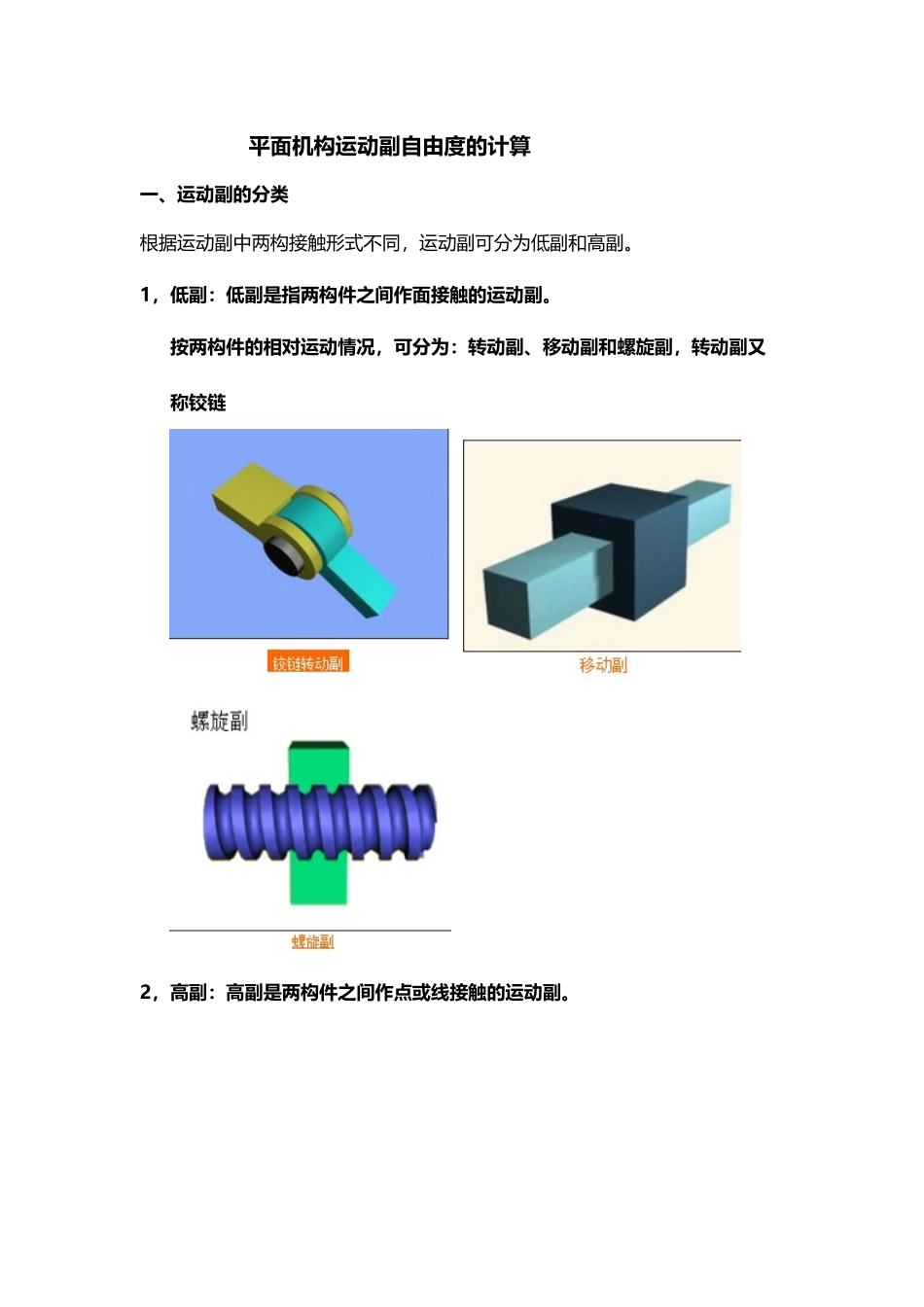
1,低副:低副是指两构件之间作面接触的运动副
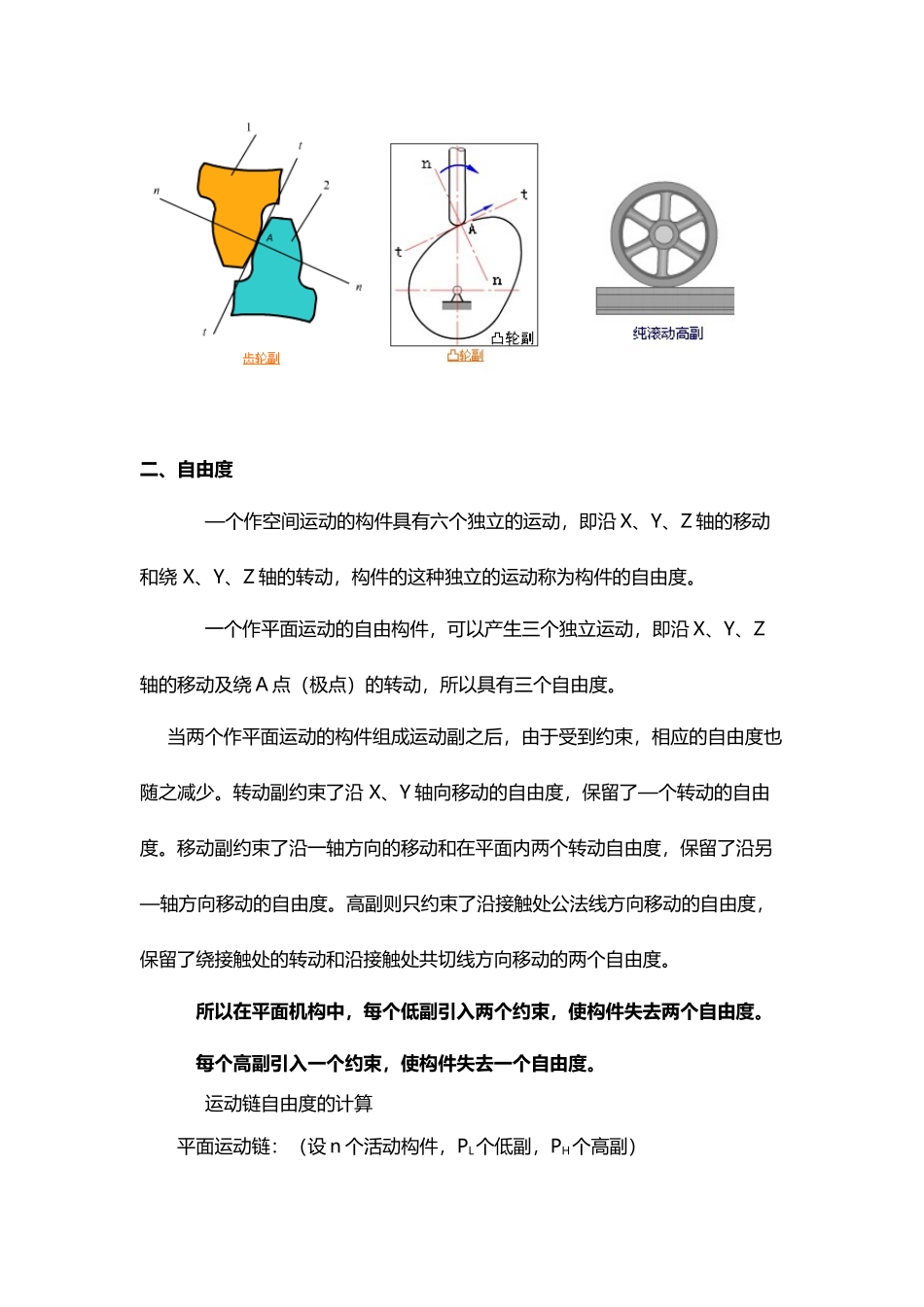
按两构件的相对运动情况,可分为:转动副、移动副和螺旋副,转动副又称铰链2,高副:高副是两构件之间作点或线接触的运动副
二、自由度—个作空间运动的构件具有六个独立的运动,即沿 X、Y、Z 轴的移动和绕 X、Y、Z 轴的转动,构件的这种独立的运动称为构件的自由度
一个作平面运动的自由构件,可以产生三个独立运动,即沿 X、Y、Z轴的移动及绕 A 点(极点)的转动,所以具有三个自由度
当两个作平面运动的构件组成运动副之后,由于受到约束,相应的自由度也随之减少
转动副约束了沿 X、Y 轴向移动的自由度,保留了—个转动的自由度
移动副约束了沿一轴方向的移动和在平面内两个转动自由度,保留了沿另—轴方向移动的自由度
高副则只约束了沿接触处公法线方向移动的自由度,保留了绕接触处的转动和沿接触处共切线方向移动的两个自由度
所以在平面机构中,每个低副引入两个约束,使构件失去两个自由度
每个高副引入一个约束,使构件失去一个自由度
运动链自由度的计算平面运动链:(设 n 个活动构件,PL个低副,PH个高副) 三,自由度的计算 计算图示机构的自由度
若有复合铰链、局部自由度或虚约束,必须指出
(已知 AB=CD,且相互平行
^—,[('\—)
、&}~《*》;】