振动理论讲义第4章单自由度系统受迫振动
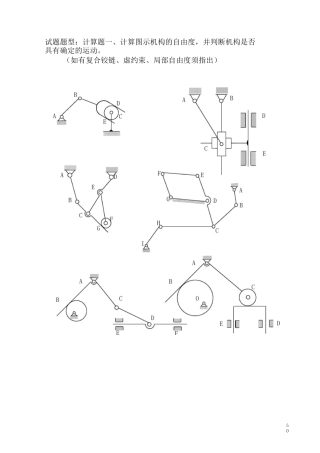
50试题题型:计算题一、计算图示机构的自由度,并判断机构是否具有确定的运动。(如有复合铰链、虚约束、局部自由度须指出)D51CGFGKBBC52D...
精品文档---下载后可任意编辑鞋业涂胶五自由度机器人机构设计的开题报告摘要:本文以鞋业涂胶为背景,针对传统手工制鞋难以实现高效、高质...
精品文档---下载后可任意编辑面对约束及其误差的少自由度并联机构分析与构型综合的开题报告1.讨论背景和意义机器人技术在现代生产、服务等...
精品文档---下载后可任意编辑面对微电子封装的两自由度高速精密定位系统讨论的开题报告一、讨论背景和意义近年来,随着微电子技术的不断进...

精品文档---下载后可任意编辑静电微器件的模型自由度缩减方法讨论的开题报告一、讨论背景随着微纳加工技术的进展,静电微器件越来越受到关...
精品文档---下载后可任意编辑五自由度写字机器人系统讨论的开题报告开题报告题目:五自由度写字机器人系统的讨论一、项目背景和意义随着科...
精品文档---下载后可任意编辑五自由度磁悬浮电主轴结构设计与控制讨论的开题报告一、讨论背景磁悬浮技术是一种基于磁力原理实现的无接触式...
精品文档---下载后可任意编辑二自由度检修机械臂的讨论的开题报告一、选题背景与意义:近年来,随着工业机器人技术的不断进步和应用,各行...

精品文档---下载后可任意编辑二自由度并联机构物理仿真平台控制系统讨论的开题报告一、选题的背景随着机器人技术的进展和社会需求的加强,...

精品文档---下载后可任意编辑二自由度康复训练机器人系统的设计开题报告一、选题背景随着人口老龄化和人们对健康的重视,康复医疗在近年来...
精品文档---下载后可任意编辑二自由度回转轴并联夹具讨论的开题报告一、选题背景激光切割、高速铣削及精密装配等机械加工工艺中,需要用到...
精品文档---下载后可任意编辑二自由度并联机器人的模糊免疫 PID 控制讨论的开题报告一、选题背景和讨论意义随着科学技术的不断进展,机器...
精品文档---下载后可任意编辑两自由度分段线性系统模态分析的开题报告一、讨论背景与意义在工程领域,分段线性系统广泛应用于控制系统和机...
精品文档---下载后可任意编辑两级升降多自由度机械臂设计的开题报告一、选题的背景随着机器人技术的快速进展,机械臂的应用也越来越广泛,...

精品文档---下载后可任意编辑不确定二自由度冗余并联机器人控制方法讨论的开题报告标题:不确定二自由度冗余并联机器人控制方法讨论一、选...
精品文档---下载后可任意编辑三杆五自由度并联平台激光喷涂运动学建模与仿真讨论的开题报告一、选题背景及意义激光喷涂技术作为目前一种先...

精品文档---下载后可任意编辑三向六自由度振动控制系统控制算法的讨论与仿真的开题报告一、选题背景随着科技的不断进展,振动控制技术得到...
精品文档---下载后可任意编辑一种自由度并联机器人运动学分析的开题报告概述自由度并联机器人作为一种特别的机器人结构,通常具有很高的运...

精品文档---下载后可任意编辑一种多自由度假肢控制系统的设计的开题报告开题报告题目:一种多自由度假肢控制系统的设计讨论背景:肢体残疾...