下载后可任意编辑 1 1课程设计报告(题目) 院 ( 系 ) 名 称自动化学院 专 业 名 称机电控制 学 生 姓 名 指 导 老 ...
ansys 中 nummrg 与 glue 命令及自由度耦合的比较 ZZ CP, nset, lab,node1,node2,……node17 定义或改变耦合节点自由度 PREP7:...
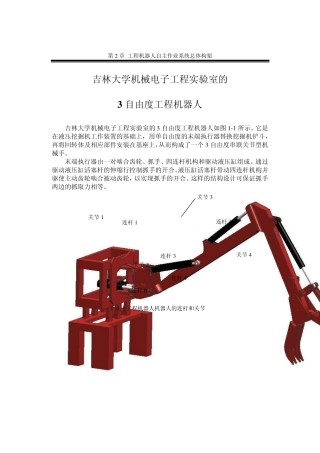
第2 章 工程机器人自主作业系统总体构架 吉林大学机械电子工程实验室的 3 自由度工程机器人 吉林大学机械电子工程实验室的3 自由度...

第2 次作业 1.如图2-1 所示,一小车(重P )自高h 处沿斜面滑下,与缓冲器相撞后,随同缓冲器一起作自由振动。弹簧常数 k ,斜面倾...
2. 六自由度搬运机械手的结构设计根据机械手的基本要求能快速、准确地拾起-放下搬运物件,这就要求它们具有高精度、快速反应、一定的承载...
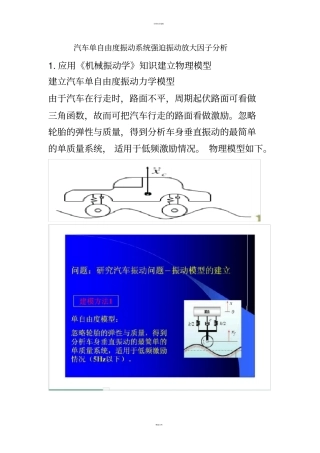
可修改可编辑精选文档汽车单自由度振动系统强迫振动放大因子分析1. 应用《机械振动学》知识建立物理模型建立汽车单自由度振动力学模型由于...

结构动力学习题第四部分:多自由度系统的振动1、如图所示弹簧质量系统,当取x 1、x 2 和 x3 为广义坐标时,求系统各阶固有频率及振型....

线性二自由度汽车模型的运动微分方程为了便于建立运动方程,做以下简化:(1)忽略转向系统的影响,直接以前轮转角作为输入;(2)忽略悬架...
下载后可任意编辑四自由度多用途气动机器人结构及控制设计说明书1下载后可任意编辑 目录 目录............................................

下载后可任意编辑摘 要机器人在现代工业生产制造领域的应用越来越普遍。机器人技术是当今社会国家高新技术水平的重要体现。六自由度工业机...
利用七自由度车辆模型估计汽车状态参数
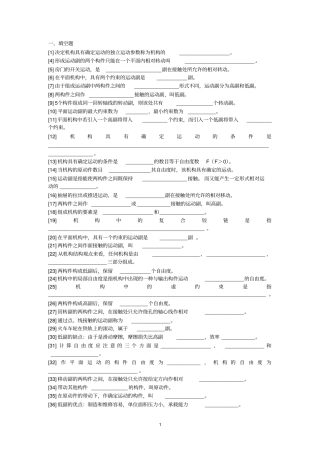
1 一、填空题[1] 决定机构具有确定运动的独立运动参数称为机构的__________________。[4] 形成运动副的两个构件只能在一个平面内相对转...
多自由度并联机构分析与控制

UR06六自由度工业机器人说明书
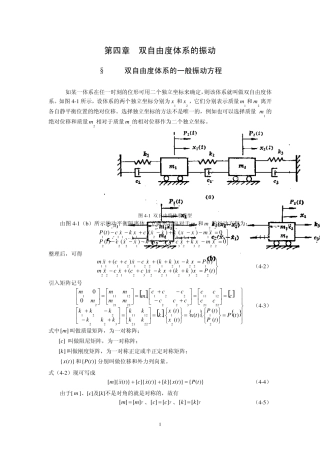
1 第四章 双自由度体系的振动 §4-1 双自由度体系的一般振动方程 如某一体系在任一时刻的位形可用二个独立坐标来确定,则该体系就叫做...
毕 业 设 计 ( 论 文 ) 任 务 书 设 计 ( 论 文 ) 题 目 : 四 自 由 度 多 用 途 气 动 机 器 人 结...

- - 1 第二章 机构的结构分析 思考题: 1. 在平面机构中,引入一个高副将引入___1___个约束,引入一个低副将引入__2___个约束。构件...
1 用matlab编程实现New mark - β 法计算多自由度体系的动力响应 用matlab 编程实现New mark - β 法 计算多自由度体系的动力...
百度文库 - 让每个人平等地提升自我 1 摘 要 汽车驾驶模拟器是一种用于汽车产品开发、“人—车—环境”交通特性研究或驾驶培训的重要...

文档从互联网中收集,已重新修正排版,word 格式支持编辑,如有帮助欢迎下载支持。 1word 格式支持编辑,如有帮助欢迎下载支持。 机械...