- - 1 第二章 机构的结构分析 思考题: 1
在平面机构中,引入一个高副将引入___1___个约束,引入一个低副将引入__2___个约束
构件总数N、运动副提供的约束总数R 与机构自由度F 的关系是 F=3(N-1)-R
平面运动副的最大约束数为 2 ,最小约束数为 1 ;移动副限制的两个自由度分别为 平面内的转动 和 平面内沿垂直于导路方向的平动 ; 3
计算平面机构自由度的公式为F= 3n-2Pl-Ph hlppn 23 ,应用此公式时应注意判断: (A) 复合 铰链,(B) 局部 自由度,(C) 虚 约束
机构具有确定运动的条件是 机构的原动件数目等于机构的自由度数目
图示为一机构的初拟设计方案
(1〕试计算其自由度,并分析其设计是否合理
如有复合铰链,局部自由度和虚约束需在图上标明; (2) 如此初拟方案不合理,请修改并用简图表示
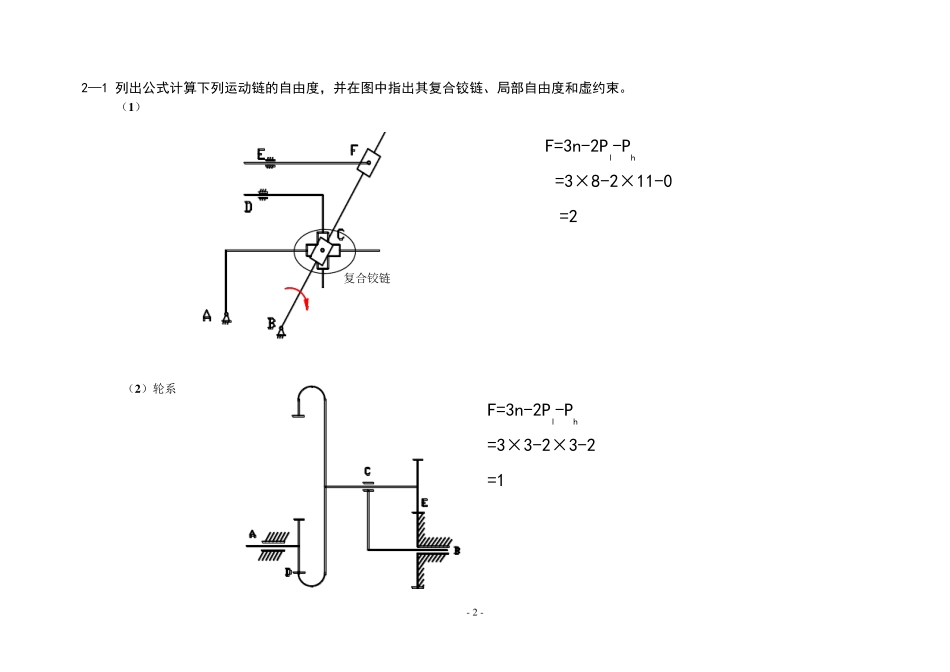
(1)F=3n-2Pl-Ph hlppn 23 =3×3-2×4-1 =0 设计不合理 局部自由度 虚约束 - - 2 2—1 列出公式计算下列运动链的自由度,并在图中指出其复合铰链、局部自由度和虚约束
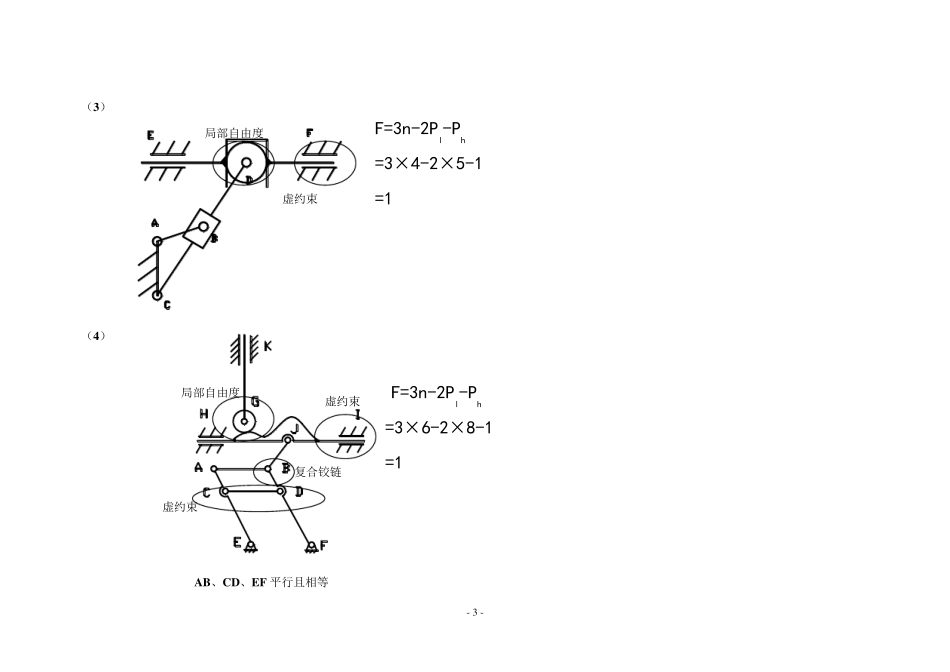
(1 ) F=3n-2Pl-Ph =3×8-2×11-0 =2 (2 )轮系 F=3n-2Pl-Ph =3×3-2×3-2 =1 复合铰链 - - 3 (3) F=3n-2Pl-Ph =3× 4-2× 5-1 =1 (4) F=3n-2Pl-Ph =3× 6-2× 8-1 =1 AB、CD、EF 平行且相等 虚约束 局部自由度 虚约束 局部自由度 虚约束 复合铰链 - - 4 (5) F=3n-2Pl-Ph =3× 8-2× 11-0 =2 (6) F=3n-2Pl-Ph =3× 8-2× 11-1 =1 CD、EF、G H 平行且相等 复合铰链 局部自由度 虚约束 - - 5 (7 )