0 机电系统课程设计说明书 六自由度机械手 学 院:农业工程与食品科学学院 班 级:农机 0901 小组人员:孙海舰 邹杨 指导老师:程卫...
六自由度工业机器人 对于工业机器人的设计与大多数机械设计过程相同;首先要知道为什么要设计机器人?机器人能实现哪些功能?活动空间(有...

1 一、填空题 1. 平面运动副的最大约束数为____2_____,最小约束数为_____1_____。 2. 平面机构中若引入一个高副将带入_____1____个约...
目 录第一章引言 …………………………………………………………………21.1 机械手的分类 …………………………………………………21.2...
1 目录1 总论 ......................................... 错误!未定义书签。1.1 概述 .............................................

西 南 交 通 大 学本科毕业设计(论文)六自由度机械手复杂运动控制年 级:200X 级学 号:200XXXX姓 名:XXX专 业: 机械工程系数控...

西南交通大学振动力学 (i) 多自由度系统的振动课件目录• 引言• 多自由度系统振动的基本理论• 多自由度系统的模态分析• 多自由度...
工学硕士学位论文高维规范形理论及其在多自由度非线性机械系统中的应用 北京工业大学2006 年 5 月摘 要 在中小跨径及一般大跨径桥梁...
1具有冗余自由度的机械手臂的构型优化作者贾腾赵宪良崔金超安少杰李朝阳赵士欣摘要:利用Pro/E软件建立了机械手臂的三维模型,并通过插件MECH...
中国计量学院本科毕业设计(论文)六自由度柔性机械臂的结构设计StructureDesignofSix-degreeoffreedomFlexibleMechanicalArms毕业设计(论...

(一)六自由运动平台介绍六自由度液压平台技术参数六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定...
大致分六大步:①找出原动件、从动件和机架;②从原动件开始依次搞清机构的运动顺序;③选择恰当的投影面,一般选择机构多数构件的运动平面...
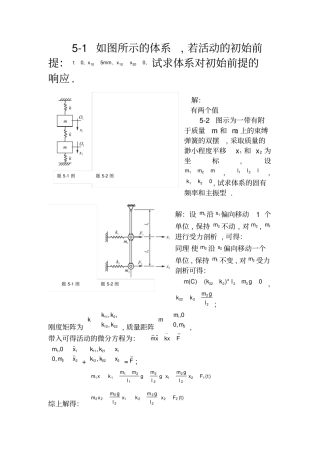
5-1如图所示的体系,若活动的初始前提:,0,mm5,0201010xxxt试求体系对初始前提的响应.解:有两个值5-2图示为一带有附于质量m1和m2上的束缚弹...

多自由度直角坐标型码垛机器人本体结构设计Bodystructuredesignofrectangularcoordinatepalletizingrobotwiththemulti-degreefreedom学生姓...

一、填空题[1]决定机构具有确定运动的独立运动参数称为机构的__________________。[4]形成运动副的两个构件只能在一个平面内相对转动叫____...

单自由度平面八杆机构摘要:机构是由具体确定相对运动的运动链所组成的。运动链的结构,包括构件的数目,运动副的结构形式和排列,以及某些...
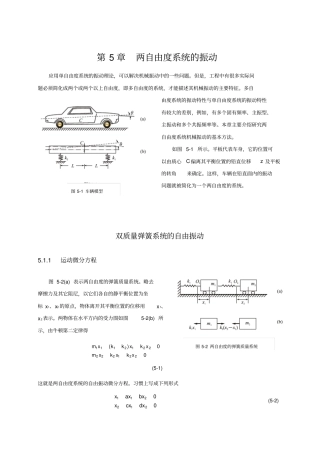
第5章两自由度系统的振动应用单自由度系统的振动理论,可以解决机械振动中的一些问题。但是,工程中有很多实际问题必须简化成两个或两个以...

第0页共9页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第0页共9页基于PLC的四自由度电动机械手的控制设计摘要:所介绍...

7自由度机械臂的底座计算机械臂实物:CAD图:重心简化模型:最大伸展状态下最大扭矩时负重{关节2作为输出力矩最大的旋转关节,额定力矩150N...

设计说明书课题:凸轮轴加工自动线机械手班级:数控69902设计:沈晓春审核:二00五年九月2目录一、目录,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,...