1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
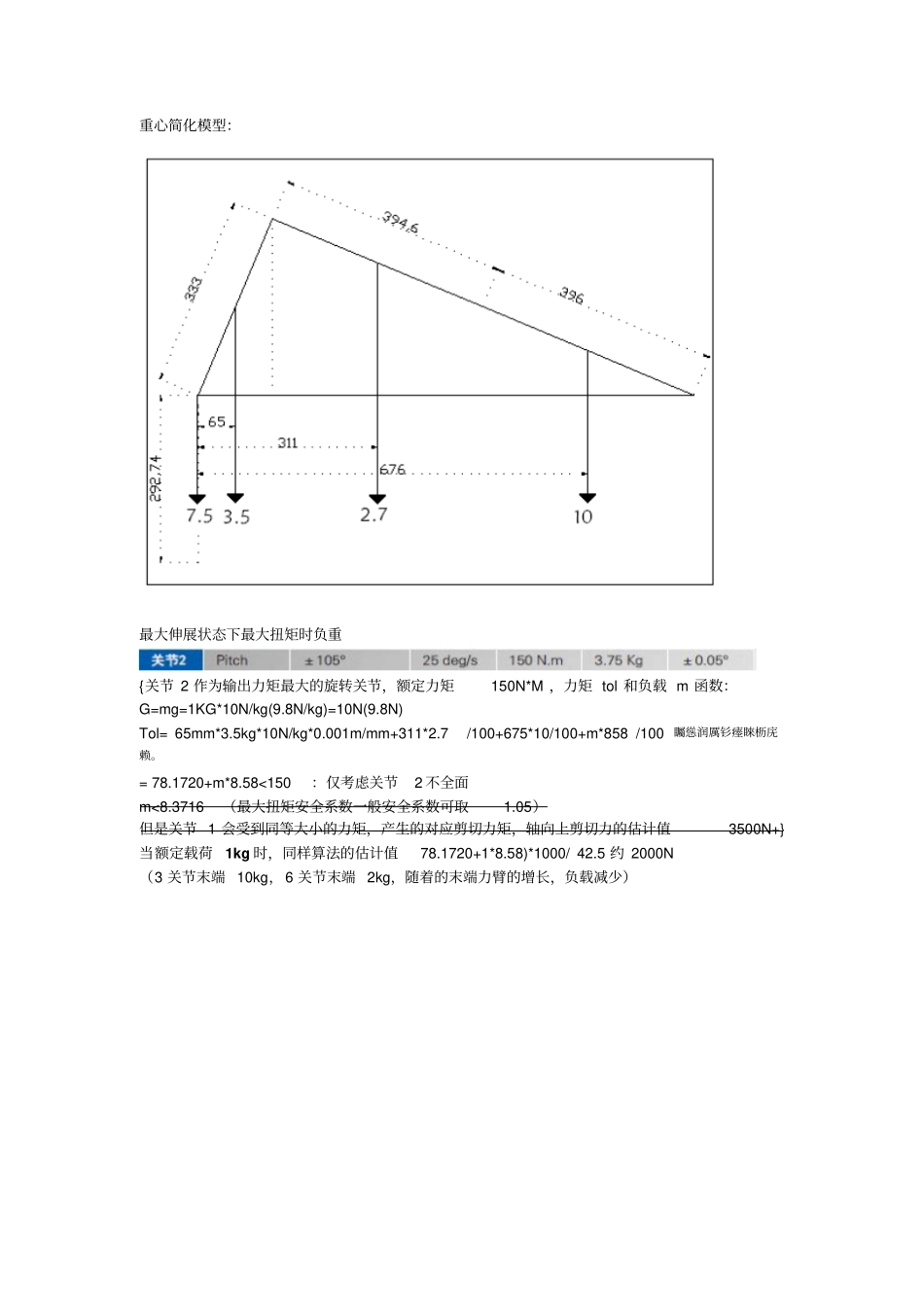
7自由度机械臂的底座计算机械臂实物:CAD图:重心简化模型:最大伸展状态下最大扭矩时负重{关节2作为输出力矩最大的旋转关节,额定力矩150N*M,力矩tol和负载m函数:G=mg=1KG*10N/kg(9
8N/kg)=10N(9
8N)Tol=65mm*3
5kg*10N/kg*0
001m/mm+311*2
7/100+675*10/100+m*858/100矚慫润厲钐瘗睞枥庑赖
1720+m*8
该用户很懒,什么也没介绍