六自由度搬运机械手的结构设计根据机械手的基本要求能快速、准确地拾起-放下搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任一位置都能自动定位等特征
设计原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺、并满足系统功能要求和环境条件;明确工件的形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对该机械手结构和运行控制的要求;尽量选用定型的标准组件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转接和编程控制
本课题设计的是一种小型的多关节式六自由度机械手,能够满足相应的动作要求,并对一些小质量工件实现抓取、搬运等一些列动作
1 六自由度搬运机械手的功能分析该机械手系统共有 6 个自由度,分别为肩的回转与曲摆,大臂的曲摆,小臂的曲摆,手腕的曲摆与回转,以及手抓的回转
该系统中基座固定,与基座相连的肩可以进行 360 度的回转;与肩相连接的大臂可以进行-90~+90 度曲摆,与大臂相连接的小臂可以进行-90~+90 度曲摆,大臂和小臂动作幅度较大,可以满足俯仰要求
手腕可以进行 360 度的旋转,手腕也可以完成-90~+90 度的曲摆,末端的手爪部分可以-90~+90 度夹持,手爪部分通过一对齿轮的啮合转动,及其四杆机构完成手爪的开合,可以满足夹持工件的要求
通过预先编好的程序,下载到单片机内,从而使该六自由度搬运机械手能独立的完成一套指定的搬运动作,并一直重复进行下去
2 六自由度搬运机械手的坐标形式和自由度2
1 六自由度搬运机械手的坐标形式按机械手手臂的不同运动形式及组合情况,其坐标形式可以分为直角坐标式、圆柱坐标式、球坐标式和关节式
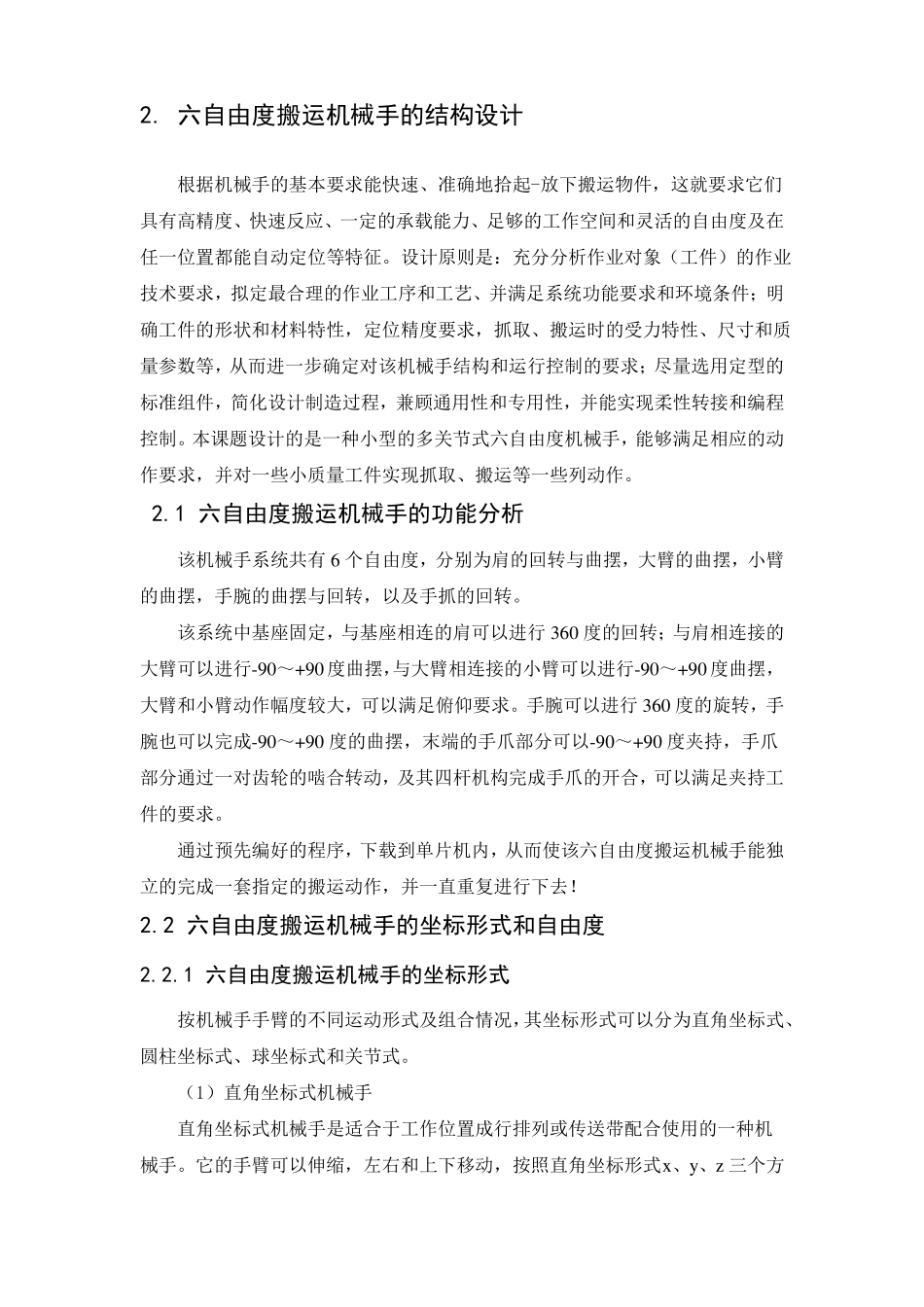
(1)直角坐标式机械手直角坐标式机械手是适合于工作位置成行排列或传送带配合使用的一种机械手
它的手臂可以伸缩,左