1 第四章 双自由度体系的振动 §4-1 双自由度体系的一般振动方程 如某一体系在任一时刻的位形可用二个独立坐标来确定,则该体系就叫做双自由度体系
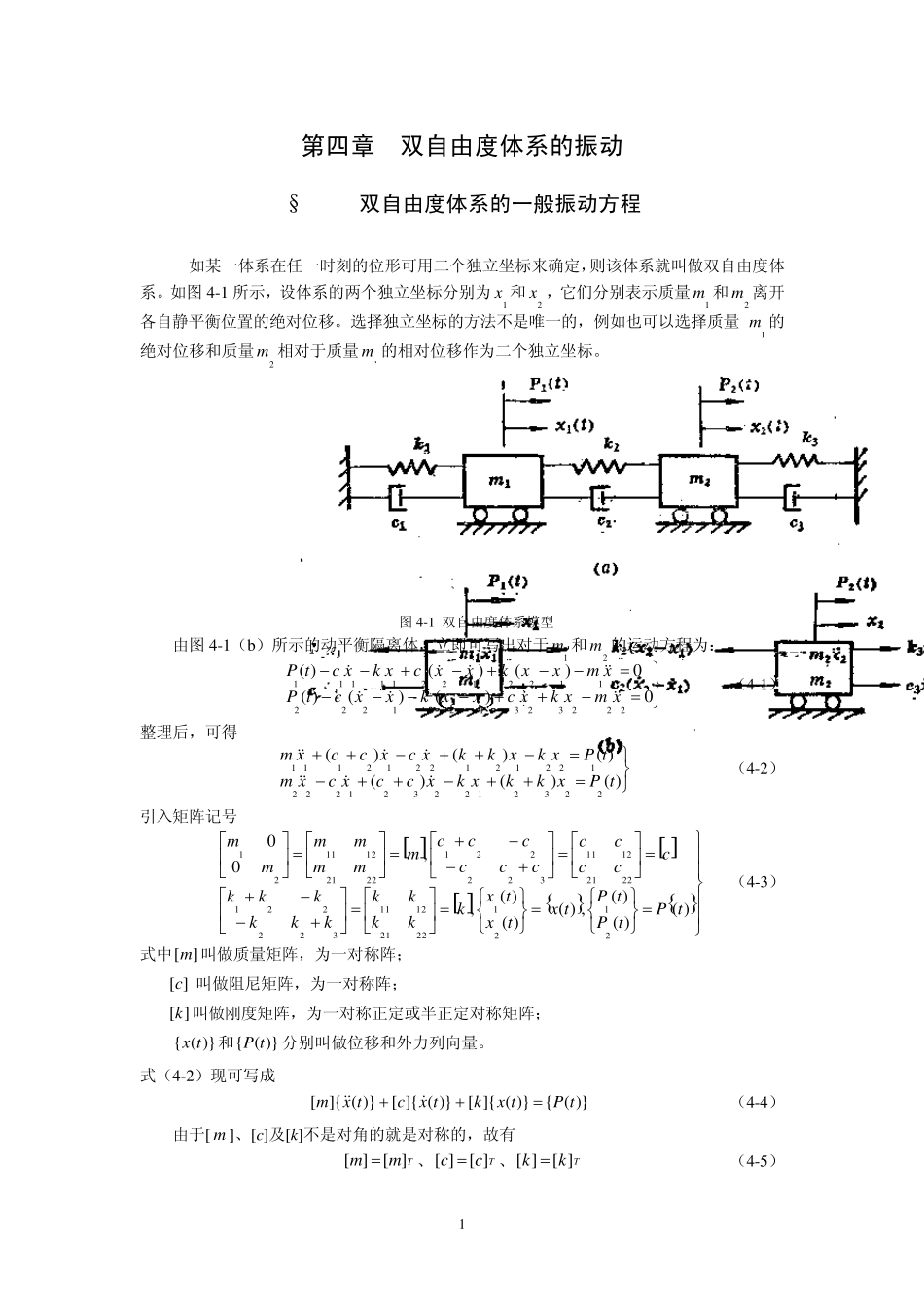
如图4-1 所示,设体系的两个独立坐标分别为1x 和2x ,它们分别表示质量1m 和2m 离开各自静平衡位置的绝对位移
选择独立坐标的方法不是唯一的,例如也可以选择质量1m 的绝对位移和质量2m 相对于质量1m 的相对位移作为二个独立坐标
图4-1 双自由度体系模型 由图4-1(b)所示的动平衡隔离体,立即可写出对于1m 和2m 的运动方程为: 0)()()(0)()()(22232312212221112212211111xmxkxcxxkxxctPxmxxkxxcxkxctP (4-1) 整理后,可得 )()()()()()(22321223212221221212212111tPxkkxkxccxcxmtPxkxkkxcxccxm (4-2) 引入矩阵记号 )()()(,)()()(,,00212122211211322221222112113222212221121121tPtPtPtxtxtxkkkkkkkkkkkcccccccccccmmmmmmm (4-3) 式中][m 叫做质量矩阵,为一对称阵; ][c 叫做阻尼矩阵,为一对称阵; ][k 叫做刚度矩阵,为一对称正定或半正定对称矩阵; )}({tx和)}({tP分别叫做位移和外力列向量
式(4-2)现可写成 )}({)}(]{[)}(]{[)}(]{[tPtxktxctxm