平面机构自由度计算例题及答案(6 页)Good is good, but better carries it
精益求精,善益求善
精品文档,超值下载4
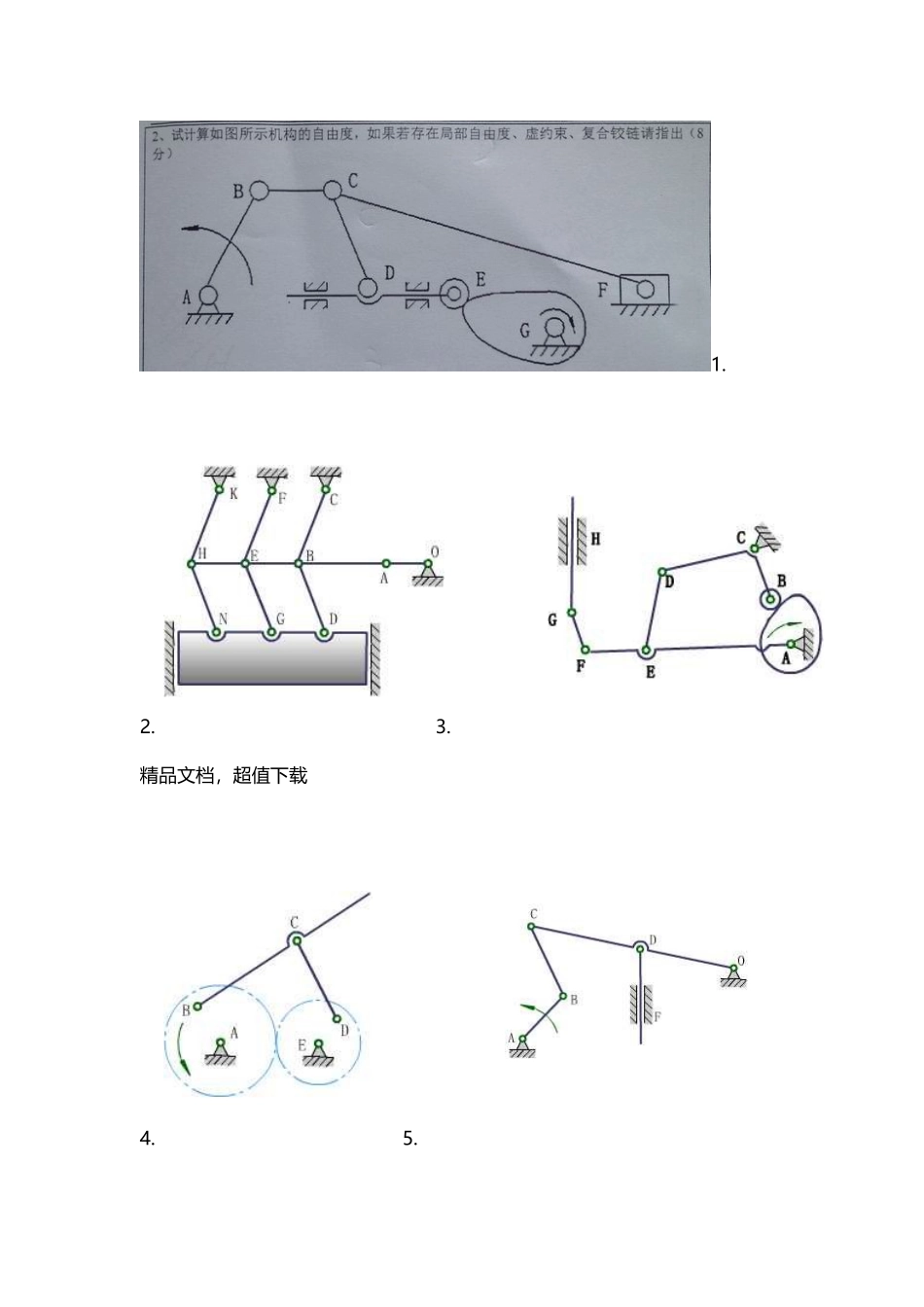
构件数 n 为 7,低副 p 为 9,高副 pn 为 1,局部自由度为 1,虚约束为 0
E 处为局部自由度,C 处为复合铰链
F=3n-2p-pn=3*7-2*9-1=2(与原动件数目一致,运动确定)2
B 处有复合铰链,有 2 个转动副
无局部自由度
B 点左侧所有构件和运动副带入的约束为虚约束,属于与运动无关的对称部分
n=5, PL=7, PH=0, F= 3n-2PL -PH=3×5-2×7-1×0=1
运动链有确定运动,因为原动件数 = 自由度数
A 处为复合铰链,因为有 3 个构件在此处组成成转动副,所以应算 2 个转动副
B 处为局部自由度,假设将滚子同构件 CB 固结
n=6, PL=8, PH=1, F= 3n-2PL -PH=3×6-2×8-1=1
运动链有确定运动,因为原动件数 = 自由度数
没有复合铰链、局部自由度、虚约束
n=4, PL=5, PH=1, F= 3n-2PL -PH=3×4-2×5-1=1
运动链有确定运动,因为原动件数 = 自由度数
计算自由度:n=4, PL=6, PH=0, F= 3n-2PL -PH=3×4-2×6-1×0=0,运动链不能动
修改参考方案如图所示
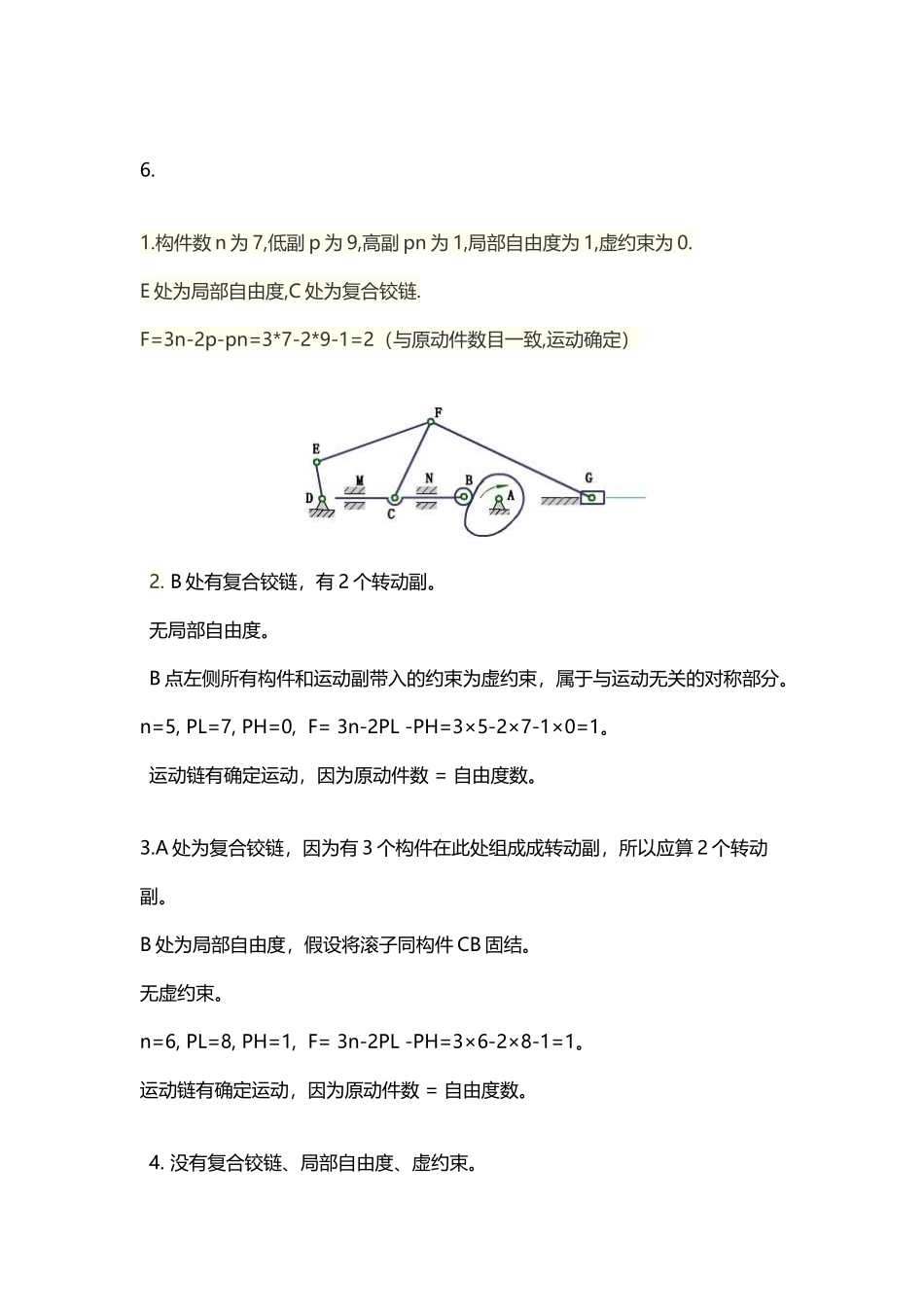
F 处为复合铰链,因为有 3 个构件在此处组成成转动副,所以应算 2 个转动副
B 处为局部自由度,假设将滚子同构件 CB 固结
移动副 M、N 中有一个为虚约束,属于两构件在多处组成运动副
n=7, PL=9, PH=1, F= 3n-2PL -PH=3×7-2×9-1=2
运动链没有确定运动,因为原动件数 < 自由度数
那么这一路上的爱恨欢愁也就有