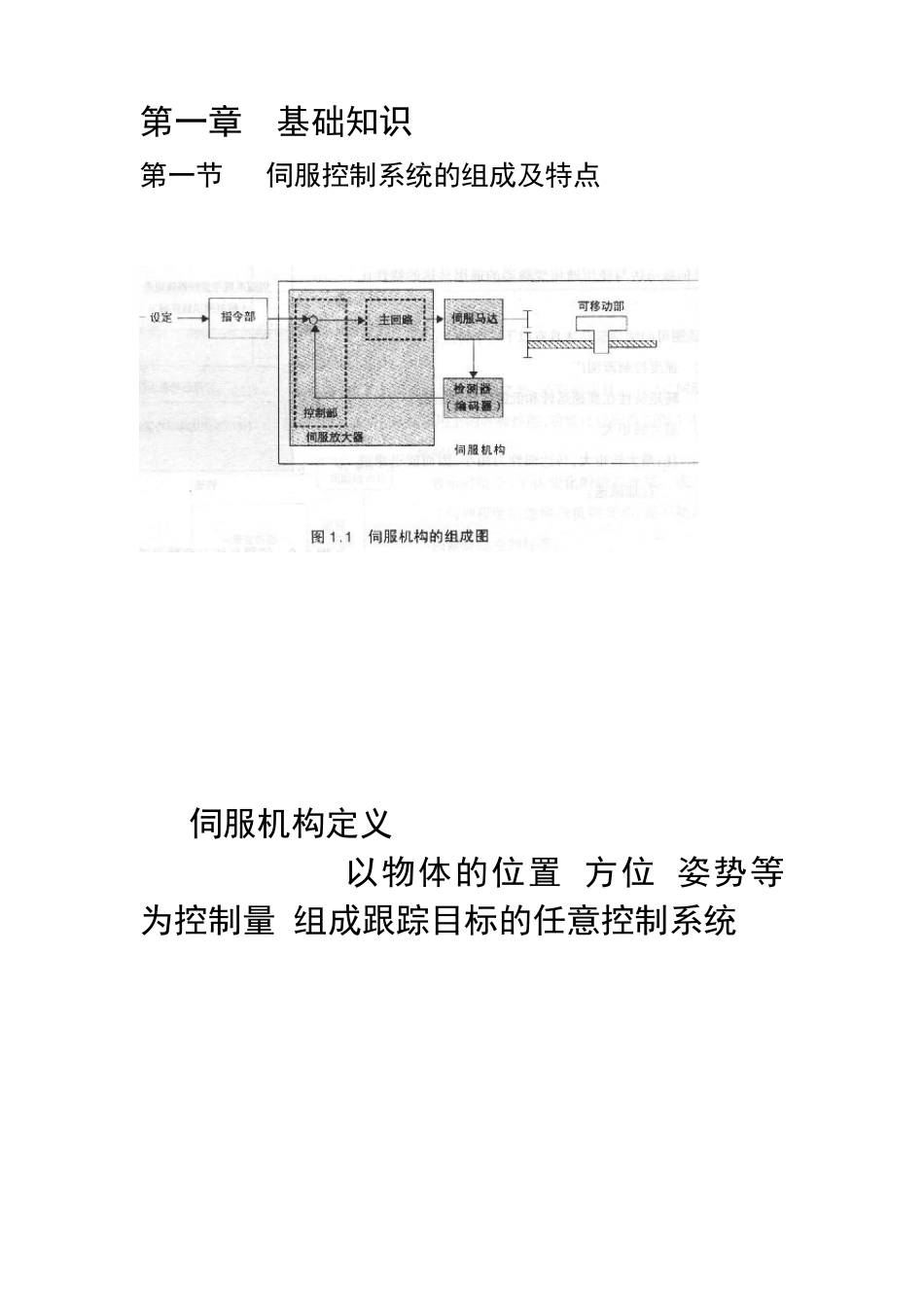
AC 伺服控制系统标准培训 王智宽 时间安排: 第一天 ①AC伺服系统综述 ②AC伺服控制系统的组成及特点 ③AC伺服马达原理 ④编码器原理 ⑤AC伺服放大器基本原理 ⑥伺服系统定位控制 第二天 QD75系列定位模块应用 第三天 MR-J2S系列伺服放大器应用 第一章 基础知识 第一节 AC伺服控制系统的组成及特点 伺服机构定义: 以物体的位置,方位,姿势等为控制量,组成跟踪目标的任意控制系统
伺服控制系统的主要性能: ① 最大转矩 300% ② 转动惯量小 ③ 转矩恒定 ④ 动态性能好 0
03% ⑤ 调速范围宽(1:1000) 用途: ① 需要定位的机械 ② 高频度定位 ③ 变速范围广的机械 ④ 转矩控制 第二节AC 伺服马达原理 1
SM 型AC 伺服马达 一般为 7
5KW 以下 AC 伺服马达
马达定子线圈,是通过逆变器的晶体管ON-OFF,给垂直于转子磁铁的磁通的线圈通电
外加电压可在数 KHZ内转换
施于线圈电压的正负区间是根据接在马达轴上的检测器指示的磁极位置信号进行判断
始终保持磁通和电流被控制成垂直状态,保持转子和定子同步,即效率最高
IM (感应) 型AC 伺服马达 一般为 7
5KW 以上(不包括 7
5KW)AC 伺服马达
原理与异步电动机(鼠笼)相同
变频交流感应电机
矢量控制:定子电流分解为:磁通电流和转矩电流矢量
第三节 编码器原理 1
增量编码器 2
机械式绝对位置编码器 二进制----格雷码 3 电子式绝对位置编码器 第四节 AC 伺服放大器基本原理 第五节伺服系统定位控制 1 位置控制方式 2
定位指令装置与伺服放大器的分工 A
定位指令装置功能: ① 机械进给量的指令脉冲输出 ② 决定机械速度的脉冲频率输出 ③ 决定控制对象运动特性曲线 ④ 记忆理论上的机械位置 B
伺服放大器的功能: ① 按照定