AGV 系统结构设计以及动力学建模型 内容提要:设计了一辆前后轮分独立驱动的小车,后轮用步进电机驱动,实现动力源,前轮由私服电机驱动,实现转向
并建立其动力学方程
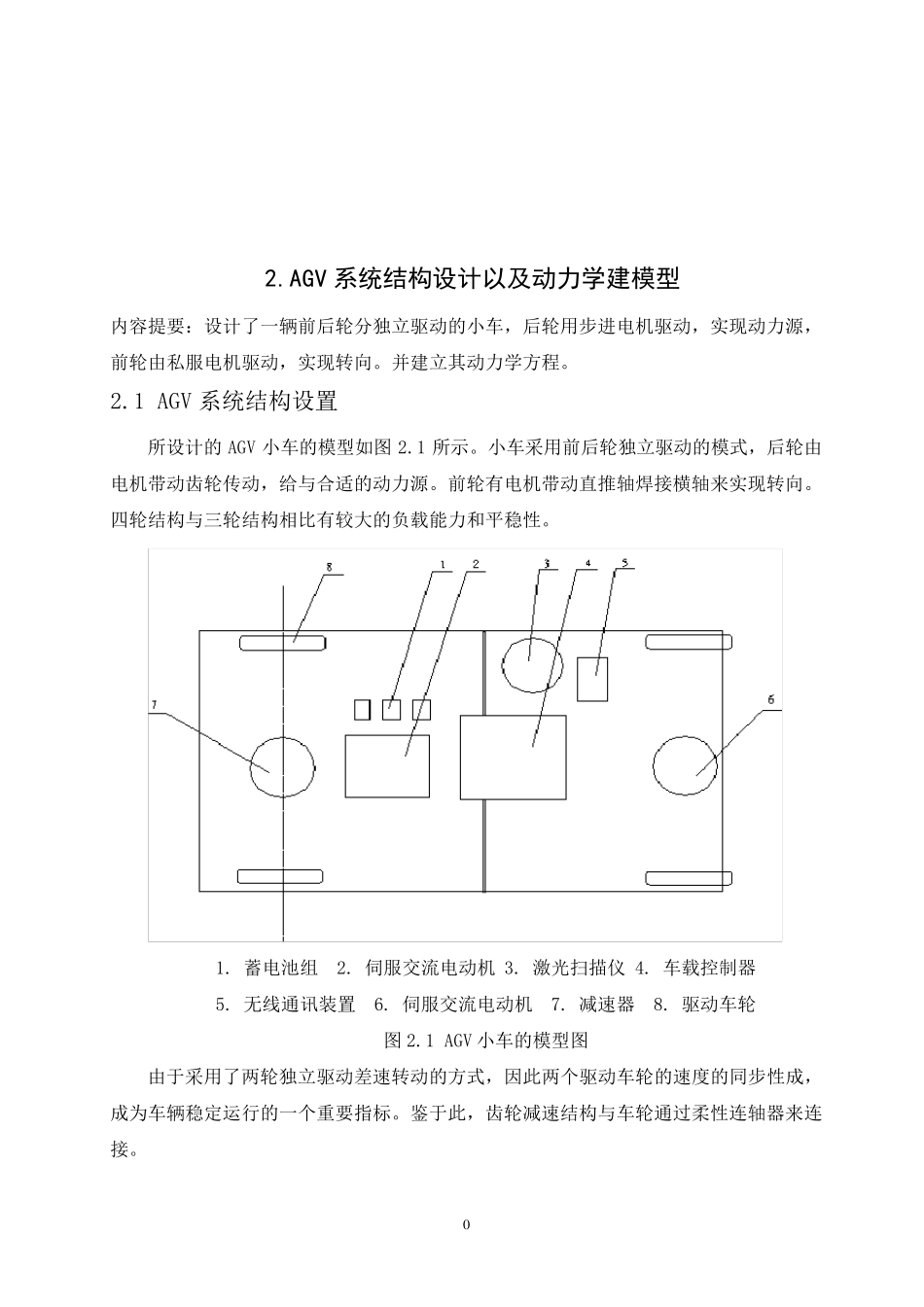
1 AGV 系统结构设置 所设计的AGV 小车的模型如图 2
小车采用前后轮独立驱动的模式,后轮由电机带动齿轮传动,给与合适的动力源
前轮有电机带动直推轴焊接横轴来实现转向
四轮结构与三轮结构相比有较大的负载能力和平稳性
蓄电池组 2
伺服交流电动机 3
激光扫描仪 4
车载控制器 5
无线通讯装置 6
伺服交流电动机 7
驱动车轮 图 2
1 AGV 小车的模型图 由于采用了两轮独立驱动差速转动的方式,因此两个驱动车轮的速度的同步性成,成为车辆稳定运行的一个重要指标
鉴于此,齿轮减速结构与车轮通过柔性连轴器来连接
2 AGV 小车的动力学建模 自从 A G V 问世以来,人们在自动导引车的控制过程中一般满足于基于运动学的控制模型,而很少有人进行基于动力学的控制设计等方面的内容
事实表明,根据AGV 车体动力学模型,可以得到直接的电机输入与行走、导向车轮转速的非线性的耦合关系,将对指导车体机械结构设计、路径规划以及合理的路径跟踪控制规律设计有重要而且深远的意义
由于 A G V 在实际问题中有较严格地面要求的环境中运动,车速较低,限定了加速度的问题,而不会发生明显的车体“上跳”运动的现象出现,故可以在二维空间来研究其动力学模型
现以我以后轮为电机带动齿轮来实现动力驱动的方式传达力矩,前轮则为由电机直接带动轴的转动从而达到转动的方式来实现转向的AGV为例建立动力学模型
AGV 由车体、蓄电池和充电系统、驱动装置、转向装置、精确停车装置、车上控制器 、通 信 装置、信 息 采 样 子 系统、超 声 探 障 保 护 子 系统、移 载 装置和车体方位