CAN 总线规范 CAN 总线属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络,位速率可高达 1MBPS
可以应用在汽车控制系统,自动化电子领域中的各种部件(传感器,灯光,执行机构等)与主机连接组成 CAN 网络
本章介绍通过 CAN 总线与液晶显示器的连接
CAN 具有下列主要特性: 1 多主站依据优先权进行总线访问
总线开放时,任何单元均可开始发送报文,具有最高优先权的报文的单元赢得总线访问权
利用这个特点可以用液晶显示器作为多主机的公用监视器,不用每台主机配一个监视器,从而节约系统成本
2 无破坏性的基于优先权的仲裁
网络上的每个主机可以同时发送,哪个主机的数据可以发送出去取决于主机所发送报文的标识符决定的优先权的大小,没有发送出去的帧可自动重发
以后将介绍数据怎样仲裁
3 借助接收滤波的多地址帧传送 收到报文的标识符与本机的接收码寄存器与屏蔽寄存器相比较,符合的报文本机才予以接收
4.远程数据请求
网络上的每个接点可以发送一个远程帧给另一个接点,请求该接点的数据帧,该数据帧与对应的远程帧以相同的标识符ID 命名
5.配置灵活性 通过八个寄存器进行接点配置,每个接点可以接收,也可以发送
6.全系统数据相容性 7.错误检测和出错信令 有五种错误类型,每个接点都设置有一个发送出错计数器和一个接收出错计数器
发送接点和接收接点在检测到错误时,出错计数器根据一定规则进行加减,并根据错误计数器数值发送错误标志(活动错误标志和认可错误标志),当错误计数器数值大于 255 时,该接点变为“脱离总线”状态,输出输入引脚浮空,既不发送,也不接收
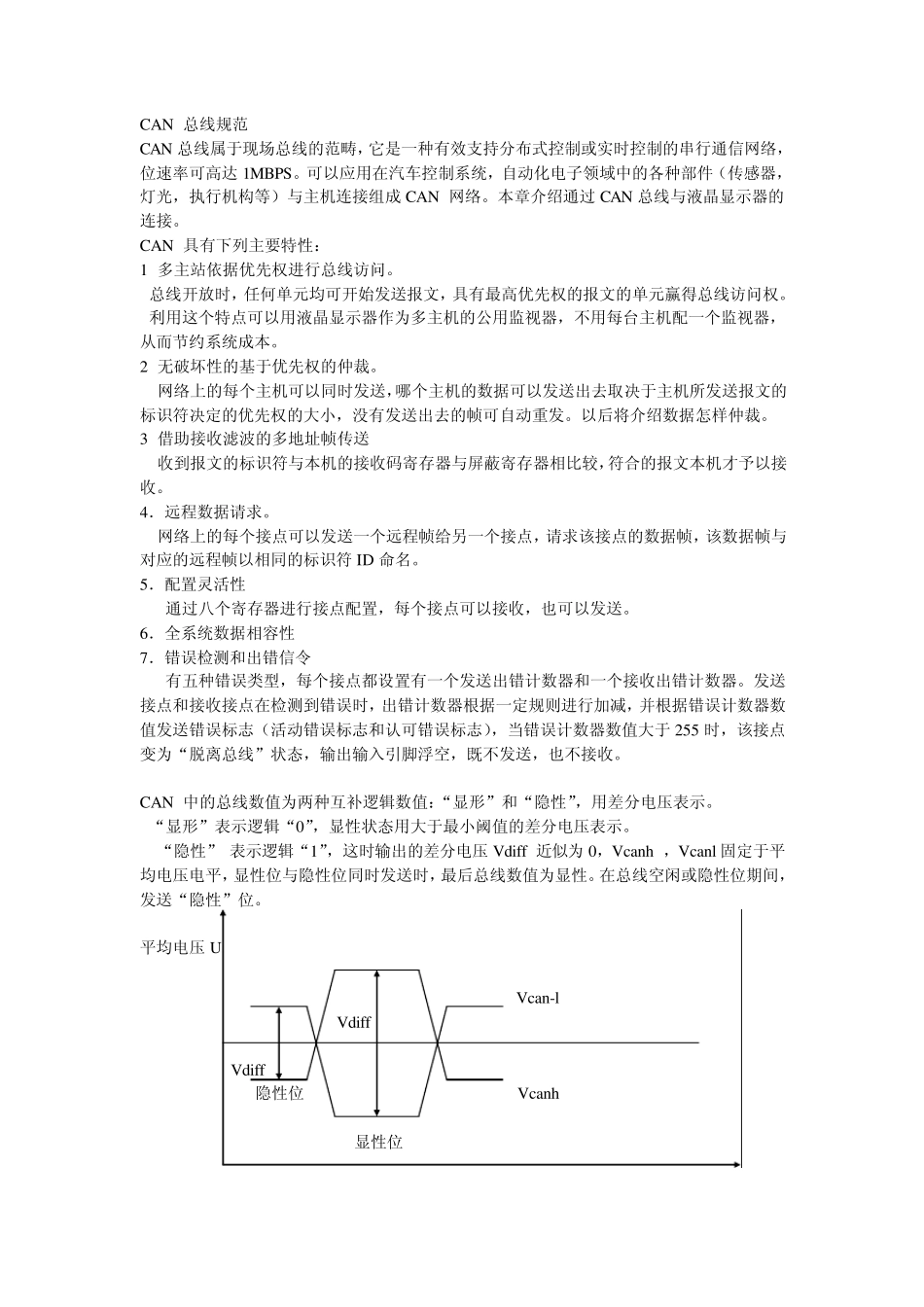
CAN 中的总线数值为两种互补逻辑数值:“显形”和“隐性”,用差分电压表示
“显形”表示逻辑“0”,显性状态用大于最小阈值的差分电压表示
“隐性” 表示逻辑“1”,这时输出的差分电压 Vdiff