下载后可任意编辑基于 BP 神经网络的自整定 PID 控制仿真一、实验目的1
熟悉神经网络的特征、结构及学习算法
通过实验掌握神经网络自整定 PID 的工作原理
了解神经网络的结构对控制效果的影响
掌握用 Matlab 实现神经网络控制系统仿真的方法
二、实验设备及条件1
计算机系统2
Matlab 仿真软件三、实验原理在工业控制中,PID 控制是工业控制中最常用的方法
这是因为 PID 控制器结构简单,实现简单,控制效果良好,已得到广泛应用
但是,PID 具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采纳神经网络控制的方法
利用神经网络的自学习这一特性,并结合传统的 PID 控制理论,构造神经网络 PID 控制器,实现控制器参数的自动调整
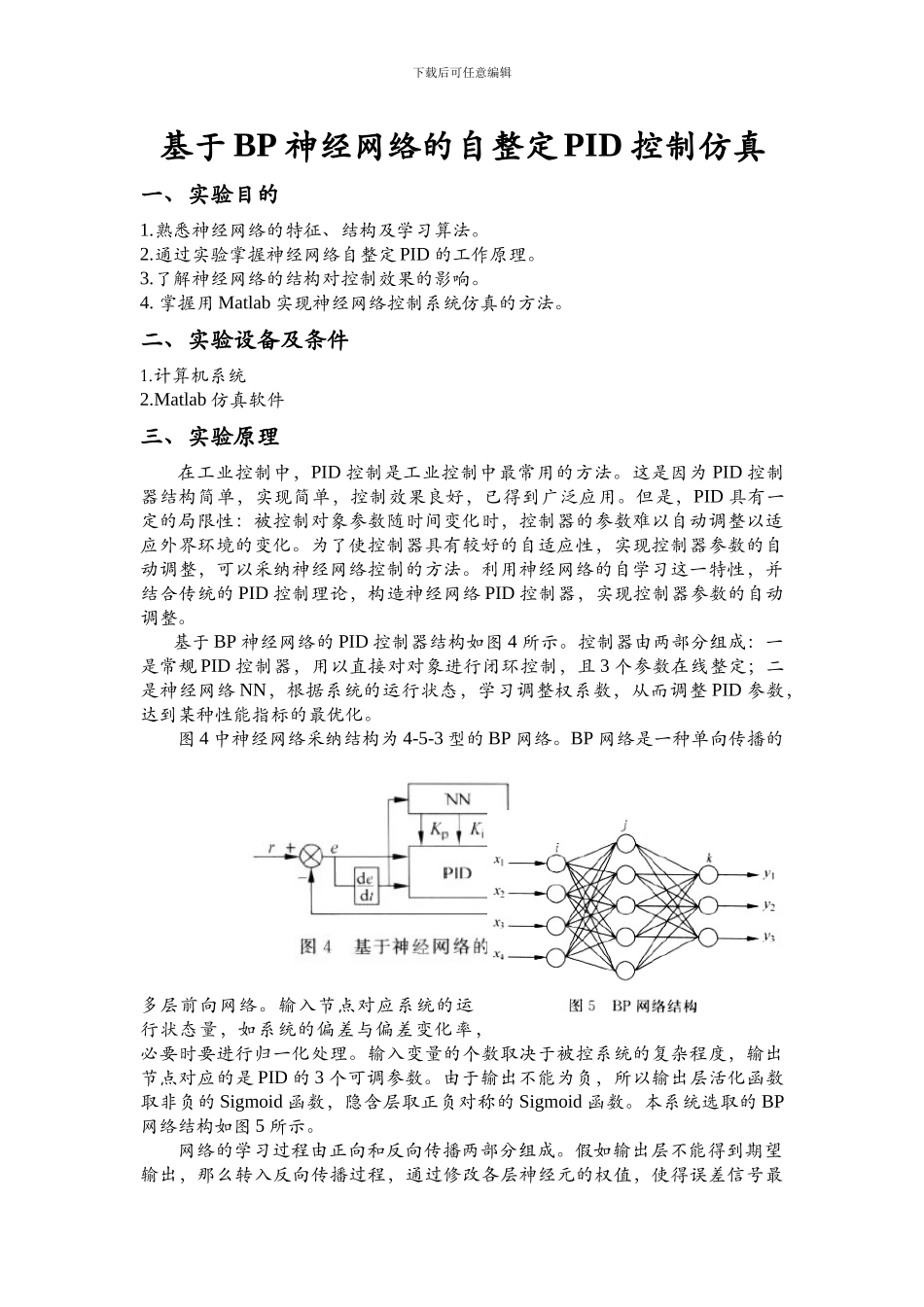
基于 BP 神经网络的 PID 控制器结构如图 4 所示
控制器由两部分组成:一是常规 PID 控制器,用以直接对对象进行闭环控制,且 3 个参数在线整定;二是神经网络 NN,根据系统的运行状态,学习调整权系数,从而调整 PID 参数,达到某种性能指标的最优化
图 4 中神经网络采纳结构为 4-5-3 型的 BP 网络
BP 网络是一种单向传播的多层前向网络
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是 PID 的 3 个可调参数
由于输出不能为负,所以输出层活化函数取非负的 Sigmoid 函数,隐含层取正负对称的 Sigmoid 函数
本系统选取的 BP网络结构如图 5 所示
网络的学习过程由正向和反向传播两部分组成
假如输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最下载后可任意编辑