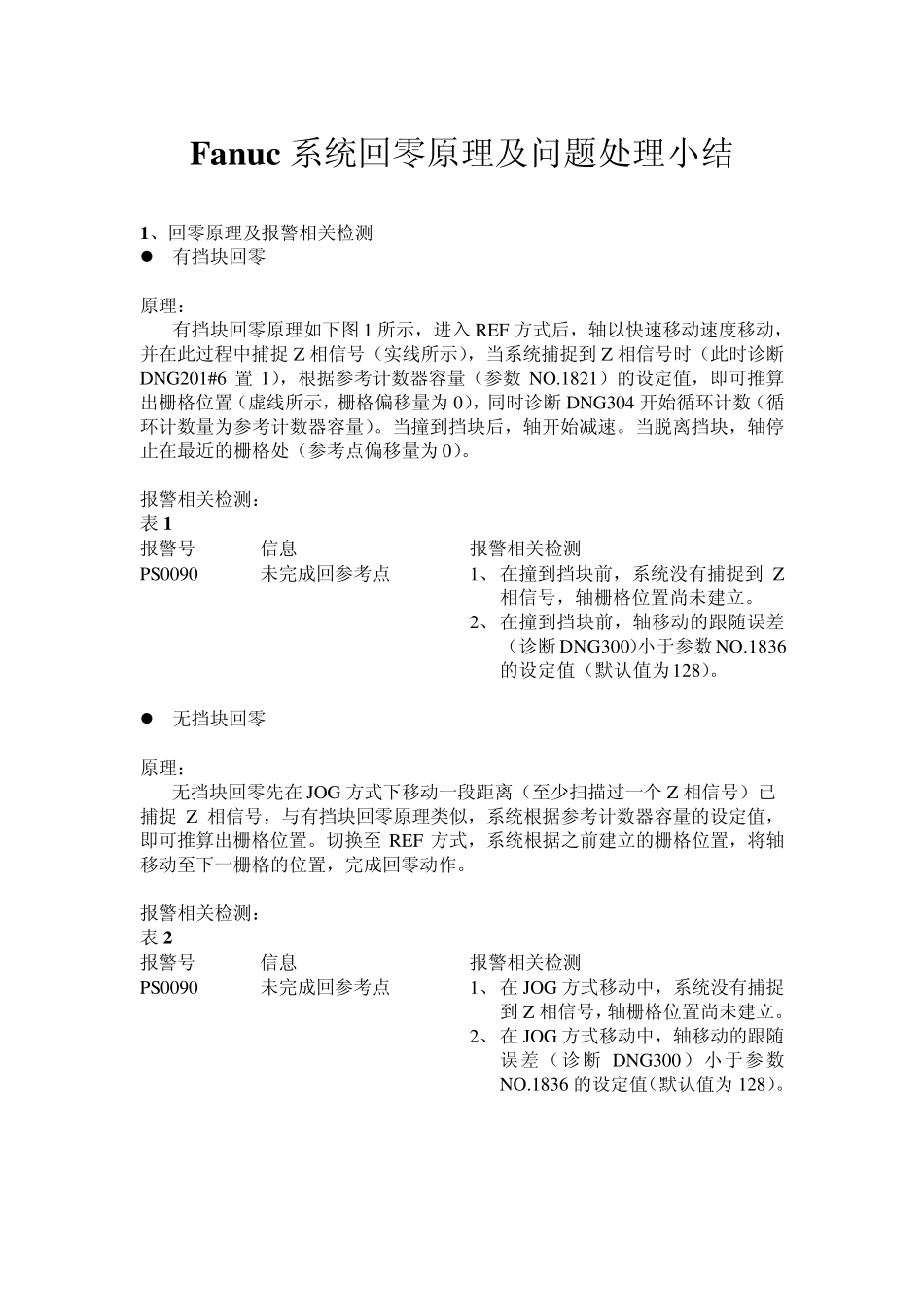
Fanuc 系统回零原理及问题处理小结 1、回零原理及报警相关检测 z 有挡块回零 原理: 有挡块回零原理如下图 1 所示,进入 REF 方式后,轴以快速移动速度移动,并在此过程中捕捉 Z 相信号(实线所示),当系统捕捉到 Z 相信号时(此时诊断DNG201#6 置 1),根据参考计数器容量(参数 NO
1821)的设定值,即可推算出栅格位置(虚线所示,栅格偏移量为 0),同时诊断 DNG304 开始循环计数(循环计数量为参考计数器容量)
当撞到挡块后,轴开始减速
当脱离挡块,轴停止在最近的栅格处(参考点偏移量为 0)
报警相关检测: 表 1 报警号 信息 报警相关检测 PS0090 未完成回参考点 1、 在撞到挡块前,系统没有捕捉到 Z相信号,轴栅格位置尚未建立
2、 在撞到挡块前,轴移动的跟随误差(诊断 DNG300)小于参数 NO
1836的设定值(默认值为128)
z 无挡块回零 原理: 无挡块回零先在 JOG 方式下移动一段距离(至少扫描过一个 Z 相信号)已 捕捉 Z 相信号,与有挡块回零原理类似,系统根据参考计数器容量的设定值,即可推算出栅格位置
切换至 REF 方式,系统根据之前建立的栅格位置,将轴移动至下一栅格的位置,完成回零动作
报警相关检测: 表 2 报警号 信息 报警相关检测 PS0090 未完成回参考点 1、 在 JOG 方式移动中,系统没有捕捉到 Z 相信号,轴栅格位置尚未建立
2、 在 JOG 方式移动中,轴移动的跟随误差(诊断 DNG300)小于参数NO
1836 的设定值(默认值为 128)
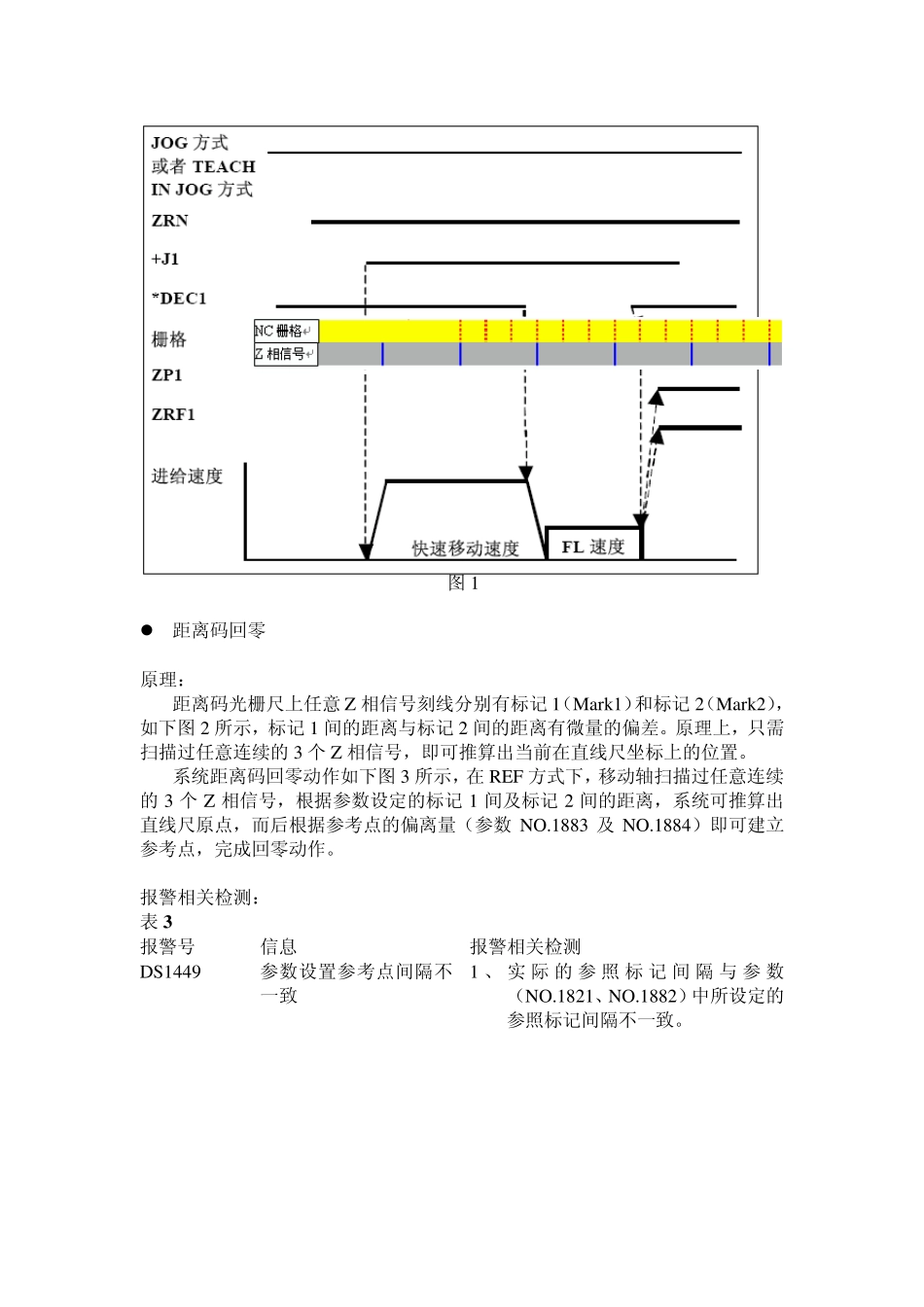
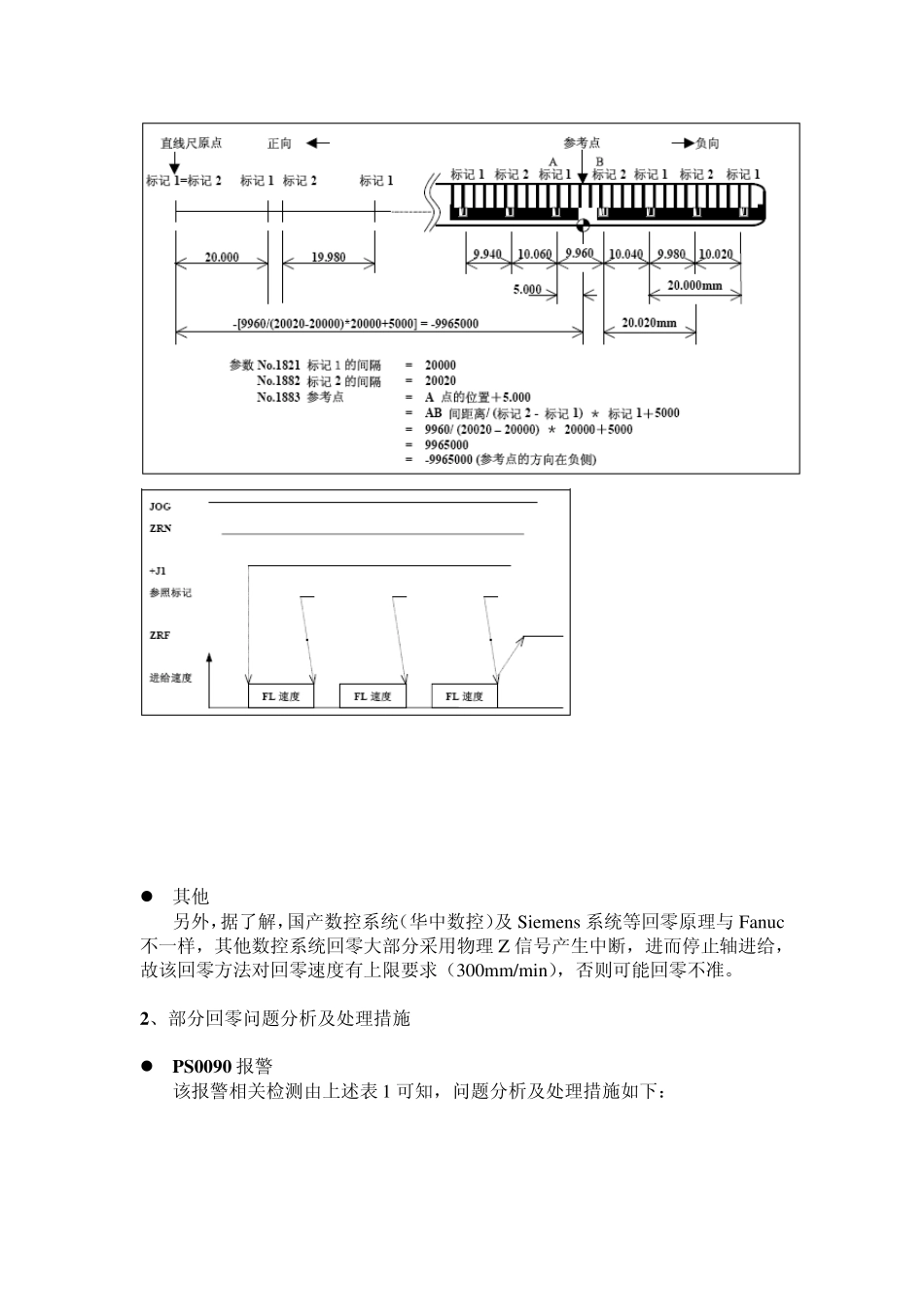
图1 z 距离码回零 原理: 距离码光栅尺上任意Z 相信号刻线分别有标记1(Mark1)和标记2(Mark2), 如下图2 所示,标记1 间的距离与标记2 间的距离有微量的偏差
原理上,只需扫描过任意连续的3 个Z 相信号,即可推算出当前在直