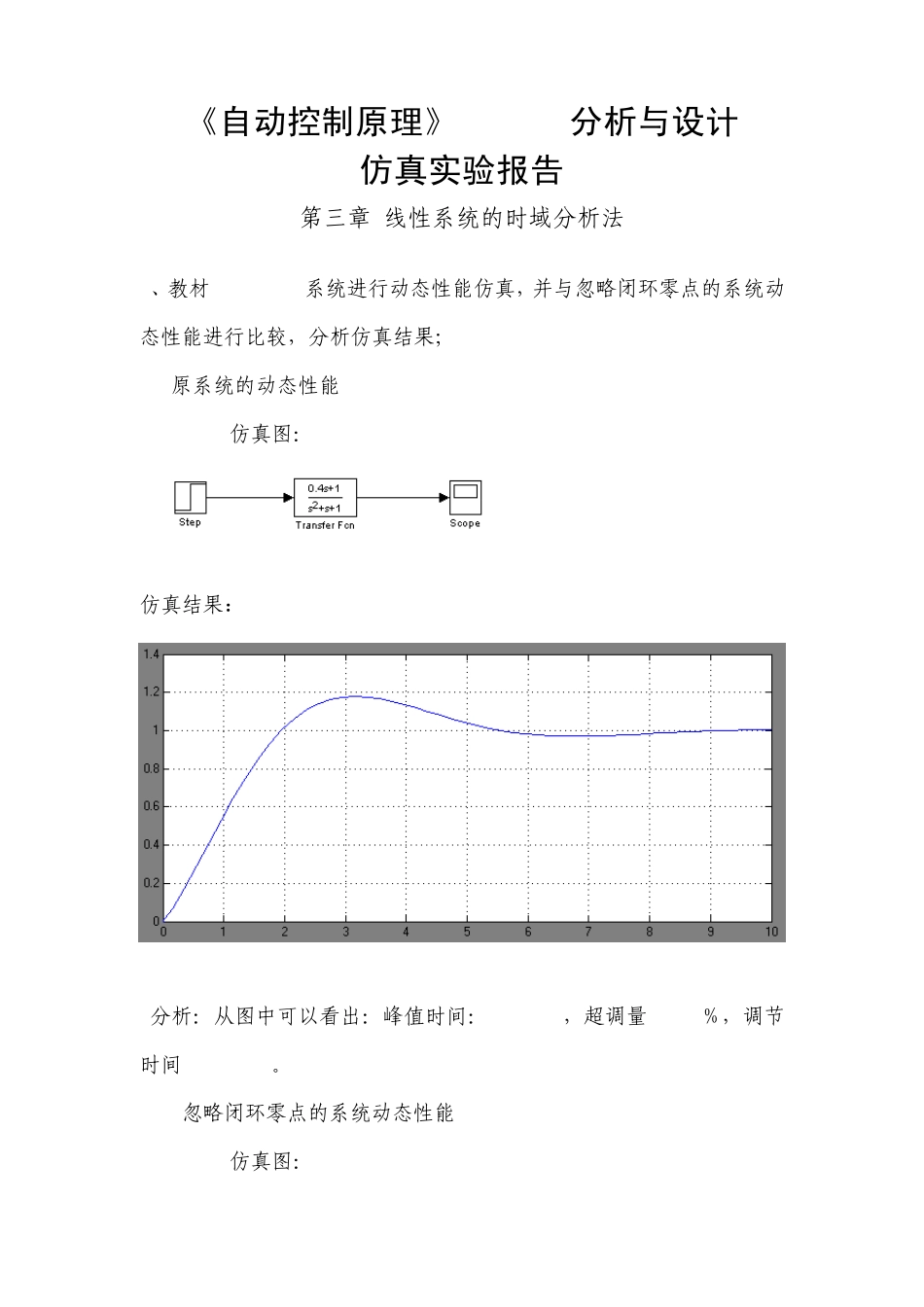
《自动控制原理》MATLAB分析与设计 仿真实验报告 第三章 线性系统的时域分析法 1、教材 P136
3-5系统进行动态性能仿真,并与忽略闭环零点的系统动态性能进行比较,分析仿真结果; (1)原系统的动态性能 SIMULINK仿真图: 仿真结果: 分析:从图中可以看出:峰值时间:tp=3
2s,超调量 18
0%,调节时间 ts=7
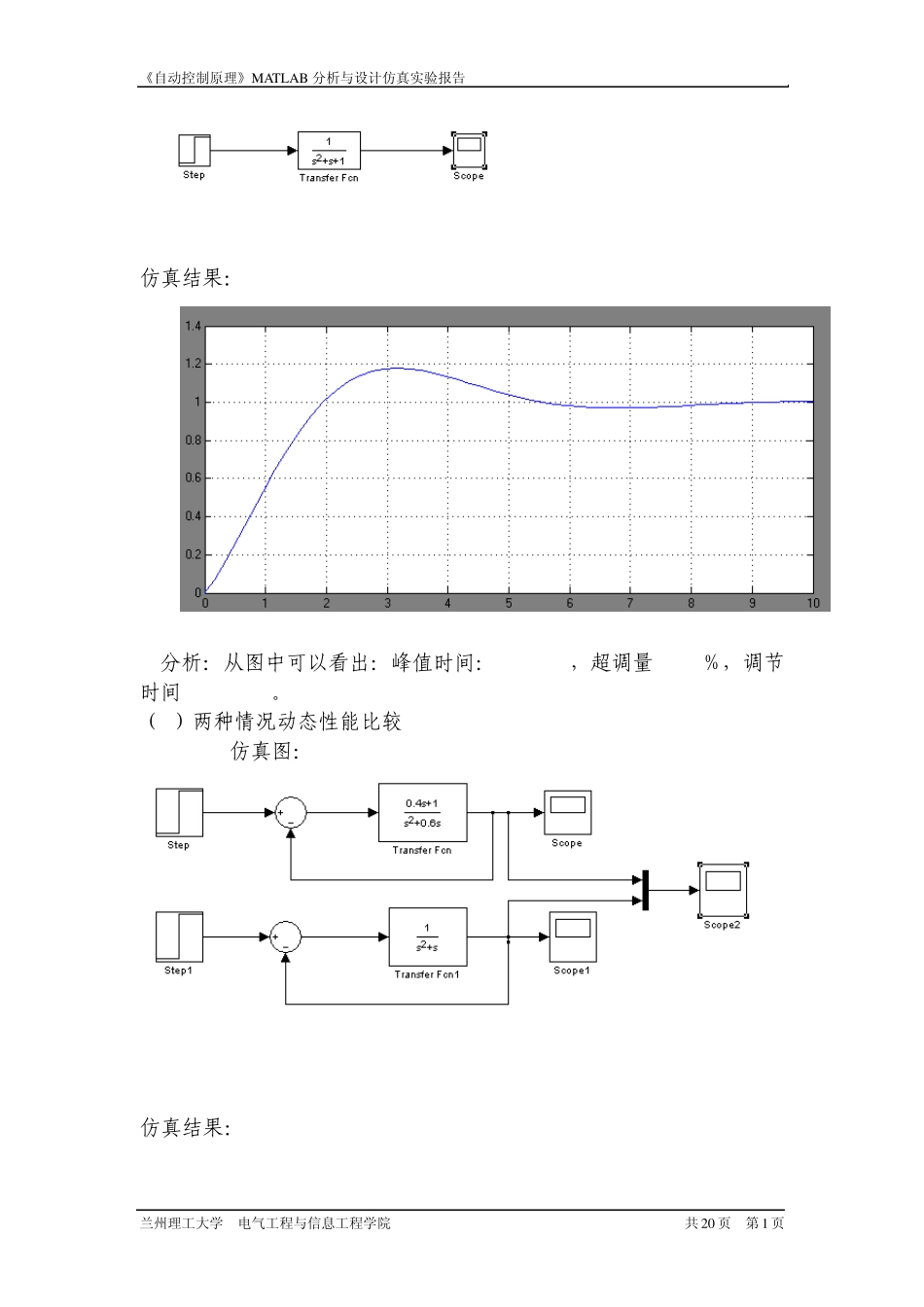
(2)忽略闭环零点的系统动态性能 SIMULINK仿真图: 《自动控制原理》MATLAB 分析与设计仿真实验报告 兰州理工大学 电气工程与信息工程学院 共 20 页 第 1 页 仿真结果: 分析:从图中可以看出:峰值时间:tp=3
6s,超调量16
7%,调节时间ts=7
(3)两种情况动态性能比较 SIMULINK仿真图: 仿真结果: 《自动控制原理》MATLAB 分析与设计仿真实验报告 兰州理工大学 电气工程与信息工程学院 共 20 页 第 2 页 分析:通过比较可以看出闭环零点对系统动态性能的影响为:减小峰值时间,使系统响应速度加快,超调量增大
这表明闭环零点会减小系统阻尼
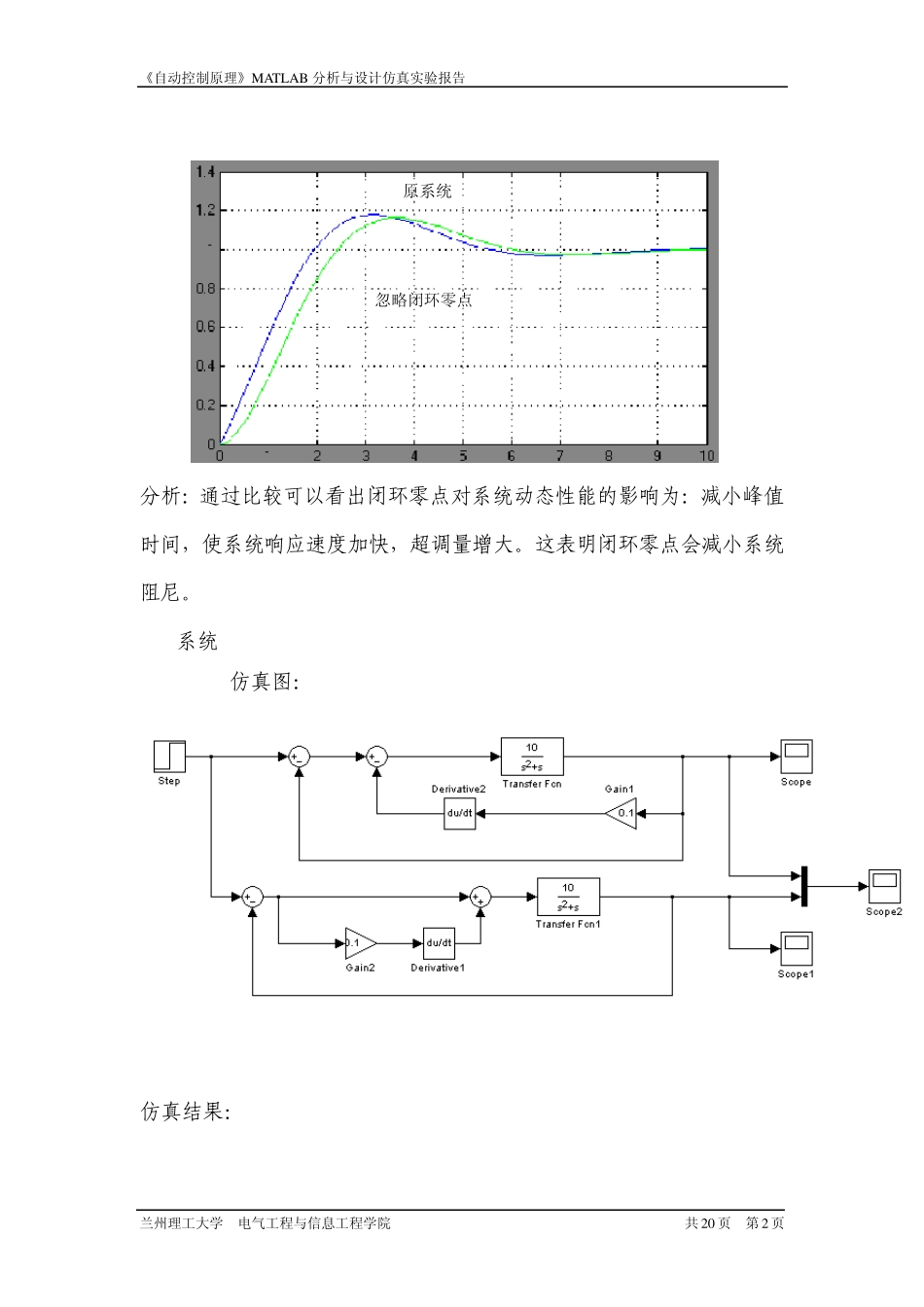
3-9系统 SIMULINK仿真图: 仿真结果: 原系统 忽略闭环零点 《自动控制原理》MATLAB 分析与设计仿真实验报告 兰州理工大学 电气工程与信息工程学院 共 20 页 第 3 页 Scope0 分析:从图中可以看出:峰值时间:tp=1
05s,超调量35
1%,调节时间ts=3
54s(△=2%)
Scope1 分析:从图中可以看出:峰值时间:tp=0
94s,超调量37
1%,调节时间ts=3
44s(△=2%)
《自动控制原理》MATLAB 分析与设计仿真实验报告 兰州理工大学 电气工程与信息工程学院 共 20 页 第 4 页 Scope2 分析:由于计算机在计算的过程也存在误差,因此,不同的参数时, 两条线重合,需将闭环传递