下载后可任意编辑FANUC 机器人设置快速校准参考位作业指导书2024-12-24修 改 记 录版本号编/改者审核者单位生效日期页数V1UWH1/STG/MFR2024-12-240、备份机器人程序
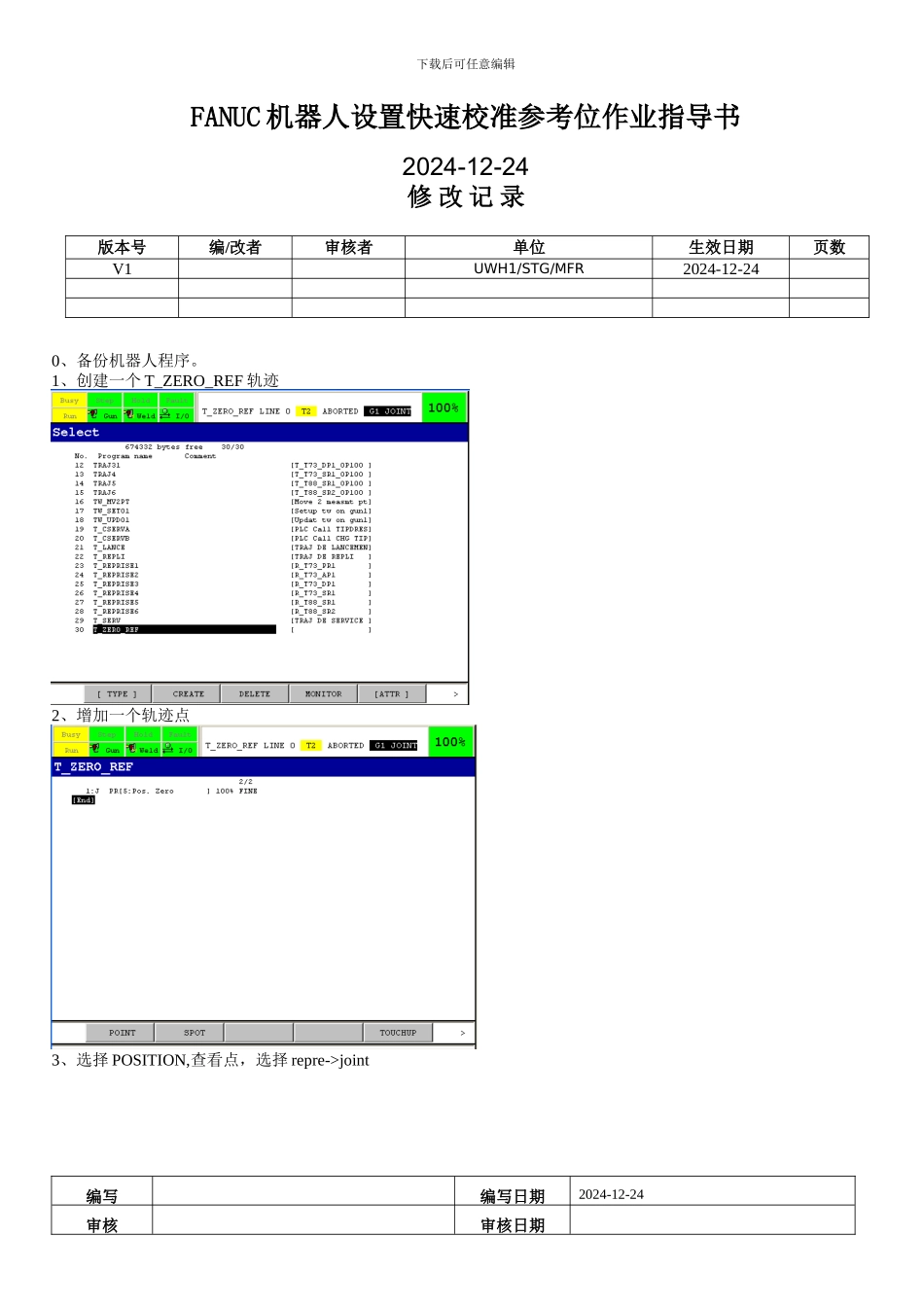
1、创建一个 T_ZERO_REF 轨迹2、增加一个轨迹点3、选择 POSITION,查看点,选择 repre->joint编写编写日期2024-12-24审核审核日期下载后可任意编辑4、修改 6 个轴坐标值均为 0(对于 6 个轴不能同时回到零位,请选择 J1 为 90deg(或者-90deg))5、手动运转 T_ZERO 轨迹,机器人手动到参考位置6、选择 system variables->master_enb,修改值为 1编写编写日期2024-12-24审核审核日期下载后可任意编辑7、选择 system->master/cal8、光标移动到 5,选择 yes,确认当前位置为快速校准参考位置选择 DONE,完成设置快速参考点工作编写编写日期2024-12-24审核审核日期下载后可任意编辑9、备份机器人程序
并拍下此时机器人姿态图
10、进入系统参数 system->DMR_GRP[1]查看并记录值CALIBRATIONQUICK MASTER$REF-POS$MASTER-COUN [1][1] =
$REF-COUNT [1][1] =
$MASTER-COUN [2][2] =
$REF-COUNT [2][2] =
$MASTER-COUN [3][3] =
$REF-COUNT [3][3] =
$MASTER-COUN [4][4] =
$REF-COUNT [4][4] =
$MASTER-COUN [5][5] =
$REF-COUNT [5][5] =
$MASTER-COUN [6]