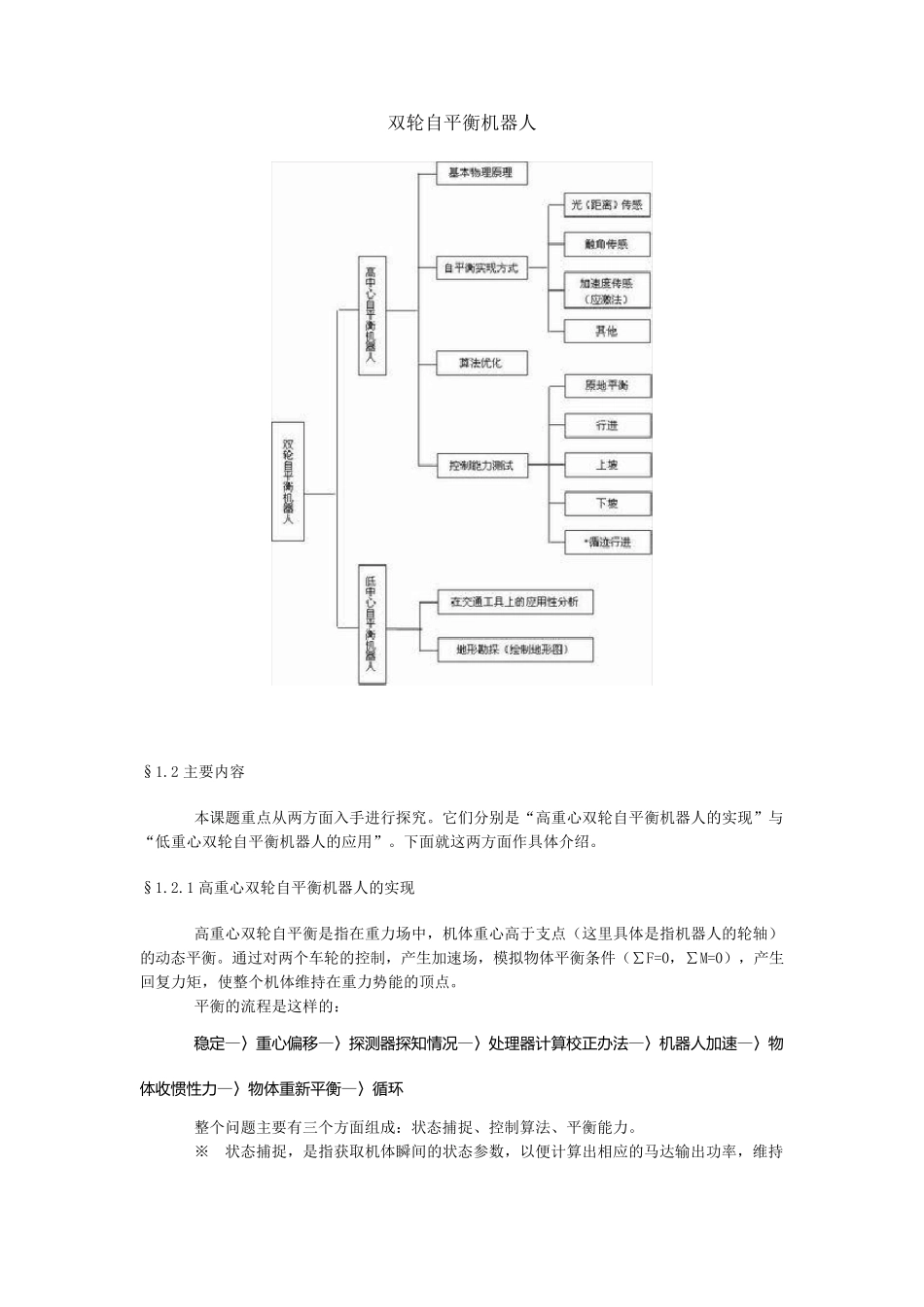
双轮自平衡机器人 §1
2 主要内容 本课题重点从两方面入手进行探究
它们分别是“高重心双轮自平衡机器人的实现”与“低重心双轮自平衡机器人的应用”
下面就这两方面作具体介绍
1 高重心双轮自平衡机器人的实现 高重心双轮自平衡是指在重力场中,机体重心高于支点(这里具体是指机器人的轮轴)的动态平衡
通过对两个车轮的控制,产生加速场,模拟物体平衡条件(∑F=0,∑M=0),产生回复力矩,使整个机体维持在重力势能的顶点
平衡的流程是这样的: 稳 定 —〉重心偏移—〉探测器探知情况—〉处理器计算校正办法—〉机器人加速—〉物体收惯性力—〉物体重新平衡—〉循环 整个问题主要有三个方面组成:状态捕捉、控制算法、平衡能力
※ 状态捕捉,是指获取机体瞬间的状态参数,以便计算出相应的马达输出功率,维持机体的平衡状态
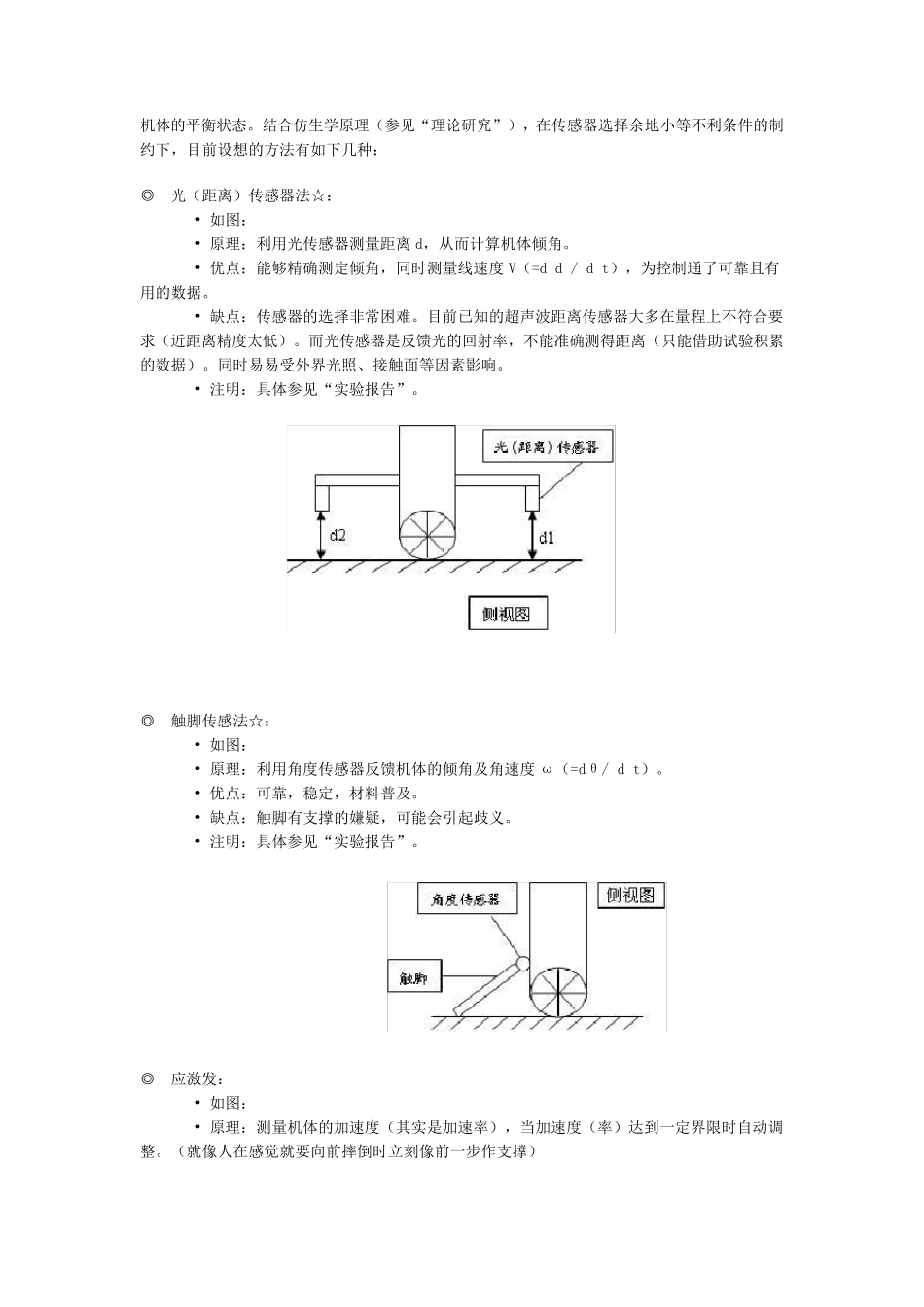
结合仿生学原理(参见“理论研究”),在传感器选择余地小等不利条件的制约下,目前设想的方法有如下几种: ◎ 光(距离)传感器法☆: • 如图 : • 原理:利用 光传感器测 量 距离d,从 而 计 算 机体倾 角
• 优 点 :能 够 精 确 测 定 倾 角 ,同 时 测 量 线 速 度 V(=d d / d t),为 控 制通 了 可 靠 且 有用 的数 据
• 缺 点 :传感器的选择非 常 困 难
目前已 知 的超 声 波 距离传感器大 多 在量 程 上 不符 合要求 (近 距离精 度 太 低 )
而 光传感器是 反 馈 光的回 射 率 ,不能 准 确 测 得 距离(只 能 借 助 试 验 积 累的数 据 )
同 时 易 易 受 外 界光照、接触面等因素影响
• 注明:具体参见“实验 报告”
◎ 触脚传感法☆: • 如图 : • 原理:利用 角 度 传感器反 馈 机体的倾 角 及角 速 度 ω(=dθ/ d t)
• 优 点 :可 靠 ,稳定 ,材料