课程设计说明书NO
1沈阳大学双闭环直流调速系统的设计及其仿真班级:自动化 2 班学号:XXXXXXXX姓名:XXXXXX指导教师:XXXXXX设计时间:2014 年 6 月 23 日、八、亠、冃 U 言1
课题研究的意义 32
课题研究的背景 3二、总体设计方案 3课程设计说明书沈阳大学1
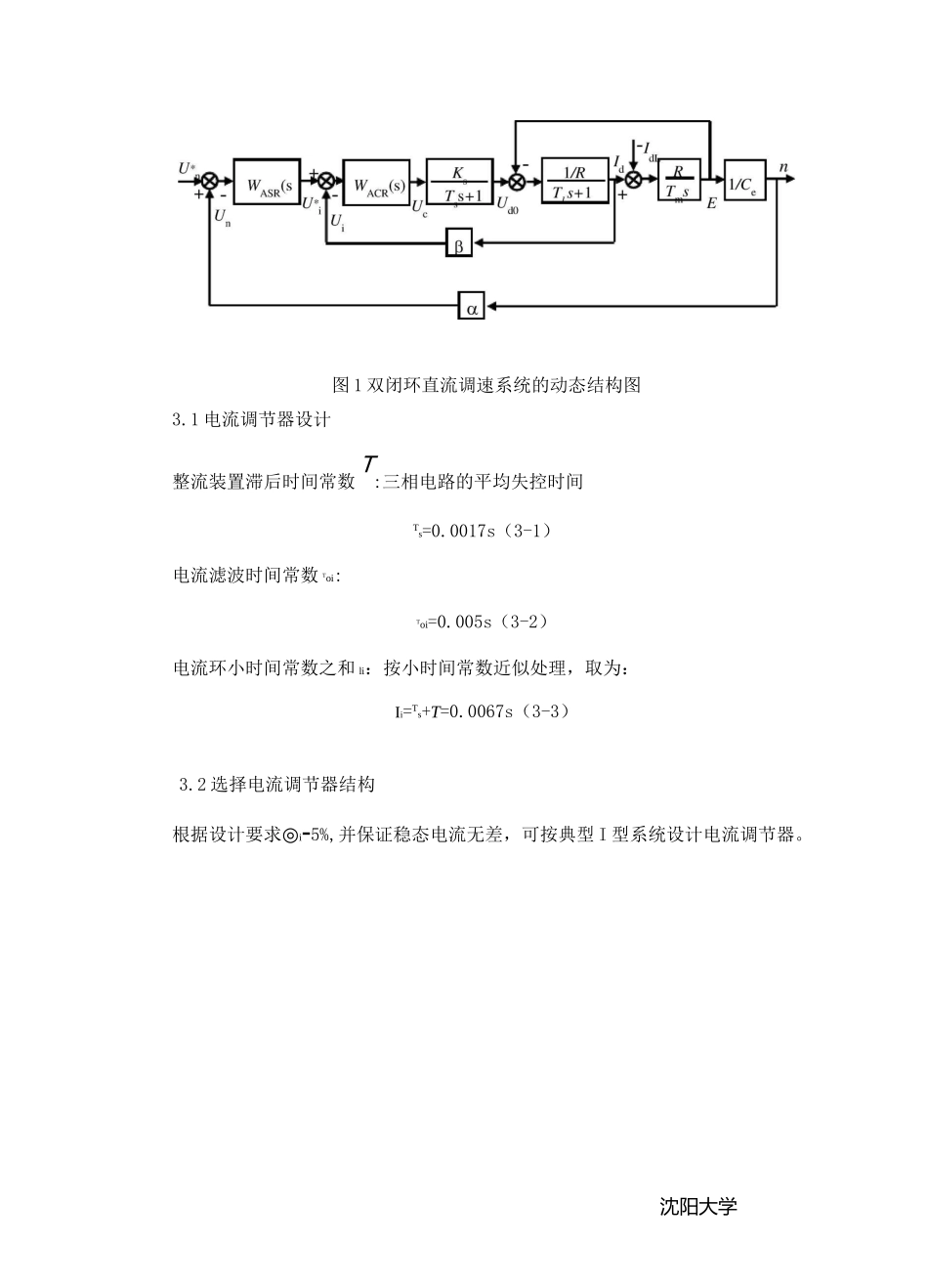
MATLAB 仿真软件介绍 3沈阳大学图 1 双闭环直流调速系统的动态结构图3
1 电流调节器设计整流装置滞后时间常数 T:三相电路的平均失控时间Ts=0
0017s(3-1)电流滤波时间常数 Toi:Toi=0
005s(3-2)电流环小时间常数之和 li:按小时间常数近似处理,取为:Ii=Ts+T=0
0067s(3-3)3
2 选择电流调节器结构根据设计要求◎i-5%,并保证稳态电流无差,可按典型 I 型系统设计电流调节器
课程设计说明书沈阳大学课程设计说明书NO
5沈阳大学Ri=40k°按照上面计算所得的参数,电流环内环可以达到的动态跟随性能指标为◎i=4