2 图[-1][-2][-3]400-12题 2
3 图r(t)ZOHc(t)1 1s TS=1b)v=1,p=0-1-1题 6 图a) v=2,p=0-1c) p=1精品文档---下载后可任意编辑2024~2024 学年一学期时间 110 分钟 08 年 12 月 19 日自动控制原理课程 64 学时 4 学分考试形式:闭卷专业年级:热动 06 总分 100 分,占总评成绩 70 %1
简答题(每小题 5 分,共 15 分)1)简要画出二阶系统特征根的位置与响应曲线之间的关系
2)什么叫相位裕量
系统的相位裕量影响系统的哪些动态指标
3)画出计算机控制系统的方框图
并简述它与模拟控制系统的异同
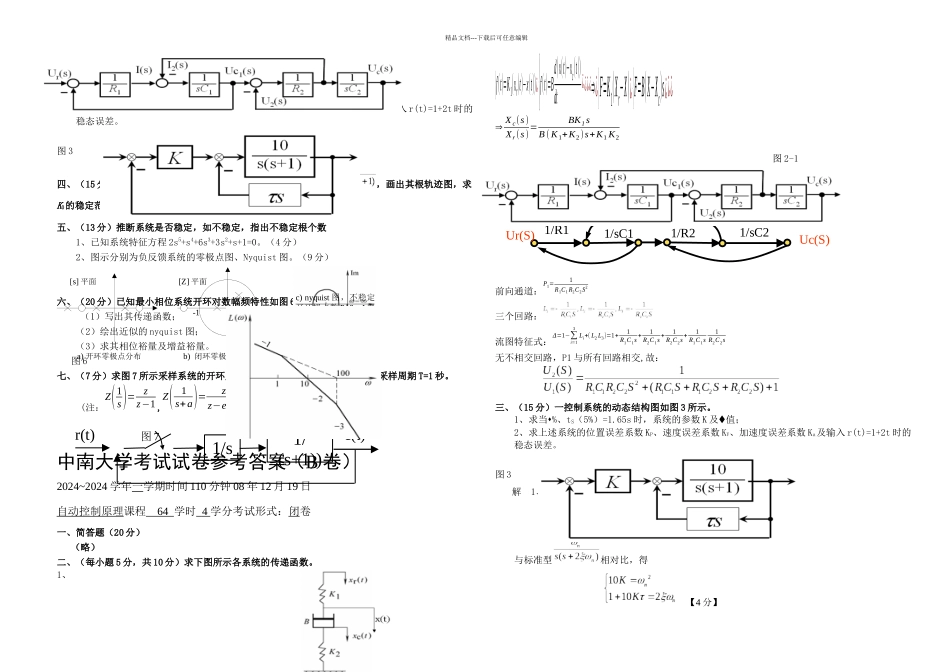
或输出(共 20 分) 画如下 RC 无源网络的方框图,并求其传递函数(8 分)2
2 已知某单位反馈系统的开环 Bode 图如下所示,求其闭环传递函数
(6 分)2
3 求如下系统的闭环传递函数(采样周期为 1s)
(6 分)3
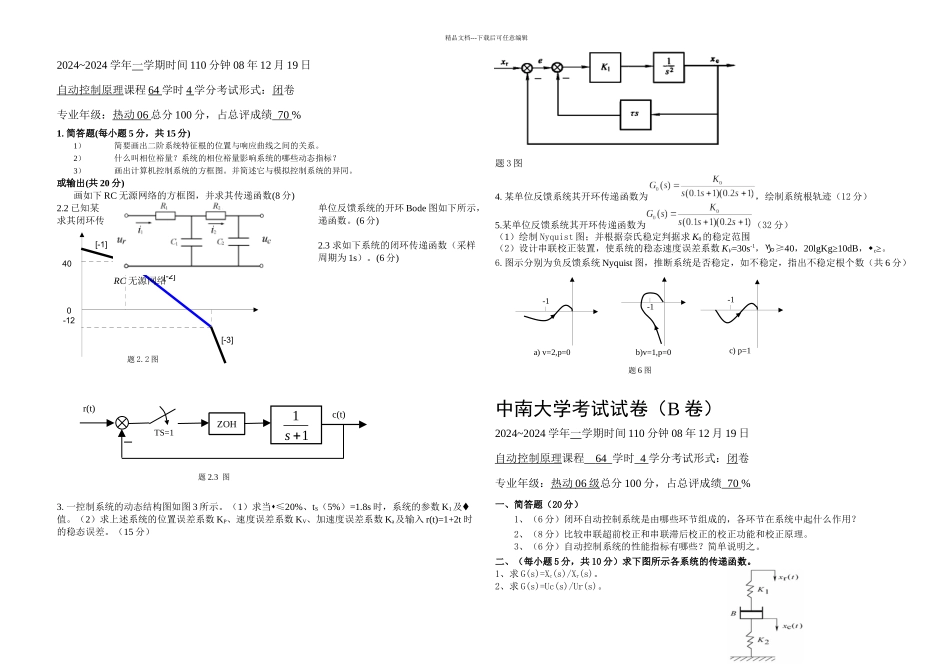
一控制系统的动态结构图如图 3 所示
(1)求当≤20%、tS(5%)=1
8s 时,系统的参数 K1及值
(2)求上述系统的位置误差系数 KP、速度误差系数 KV、加速度误差系数 Ka及输入 r(t)=1+2t 时的稳态误差
(15 分)题 3 图4
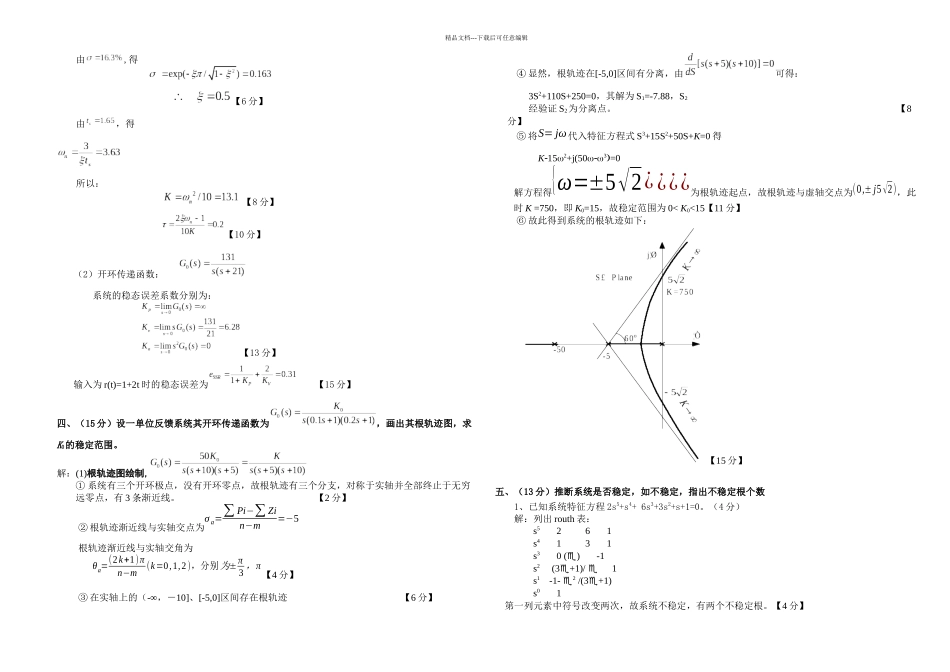
某单位反馈系统其开环传递函数为,绘制系统根轨迹(12 分)5
某单位反馈系统其开环传递函数为(32 分)(1)绘制 Nyquist 图;并根据奈氏稳定判据求 K0的稳定范围(2)设计串联校正装置,使系统的稳态速度误差系数 KV=30s-1,≥40,20lgKg≥10dB,c≥
图示分别为负反馈系统 Nyquist 图,推断系统是否稳定,如不稳定,指出不稳定根个数(共 6 分)中南大学考试试卷(B 卷)2024~2024 学年一学期时间 110 分钟 08 年 12 月 19 日自动