东北大学计算机控制理论与设计作业串级控制系统设计与仿真控制理论与控制工程樊 悦:11011552024 年 12 月 17 日精品文档---下载后可任意编辑摘要 11 引言 2 PID 控制 3 串级控制 4 SIMULINK 仿真 5 对串级控制的改进 6 结论 附录 参考文献 精品文档---下载后可任意编辑摘要串级控制系统是改善控制过程品质极为有效的方法,具有对进入副回路的扰动客服能力强,提高了系统的工作频率,有一定自适应能力等特点
利用 Simulink 结合串级 PID 控制系统,与单回路 PID 控制系统进行仿真对比,结果表明,串级 PID 控制系统更具有优势
关键词:串级控制系统,PID1 引言单回路控制系统一般情况下都能满足正常生产的要求,但是当对象滞后较大,负荷和干扰变化比较剧烈而频繁,或是工艺对产品质量提出的要求很高(如有的产品纯度要求达到 99
99%)时,采纳单回路控制方法就不太有效,于是就出现了一种所谓串级控制系统
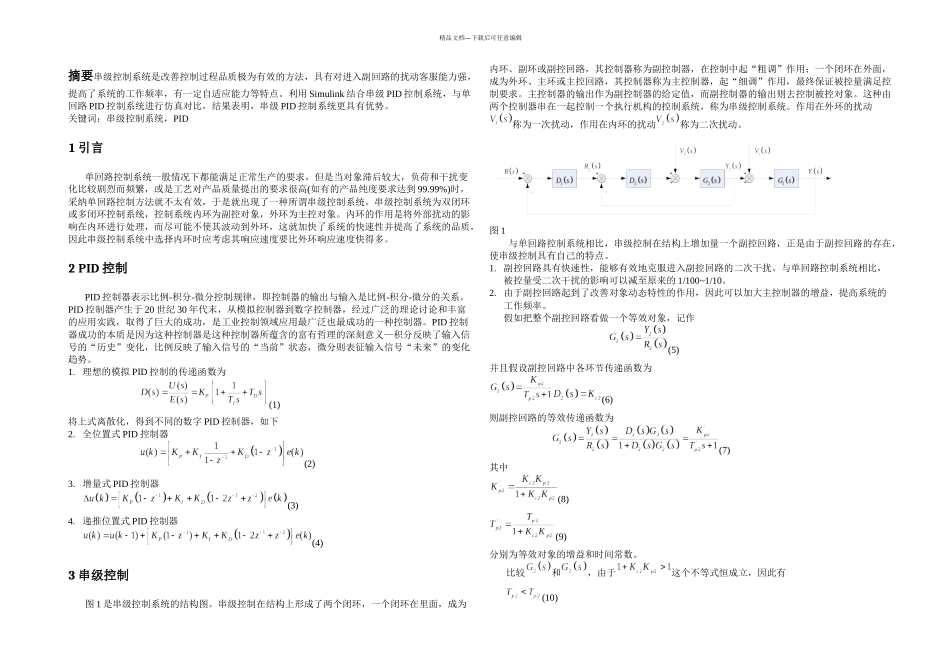
串级控制系统为双闭环或多闭环控制系统,控制系统内环为副控对象,外环为主控对象
内环的作用是将外部扰动的影响在内环进行处理,而尽可能不使其波动到外环,这就加快了系统的快速性并提高了系统的品质,因此串级控制系统中选择内环时应考虑其响应速度要比外环响应速度快得多
2 PID 控制PID 控制器表示比例-积分-微分控制规律,即控制器的输出与输入是比例-积分-微分的关系
PID 控制器产生于 20 世纪 30 年代末,从模拟控制器到数字控制器,经过广泛的理论讨论和丰富的应用实践,取得了巨大的成功,是工业控制领域应用最广泛也最成功的一种控制器
PID 控制器成功的本质是因为这种控制器是这种控制器所蕴含的富有哲理的深刻意义—积分反映了输入信号的“历史”变化,比例反映了输入信号的“当前”状态,微分则表征输入信号“未来”的变化趋势
理想的模拟 PID