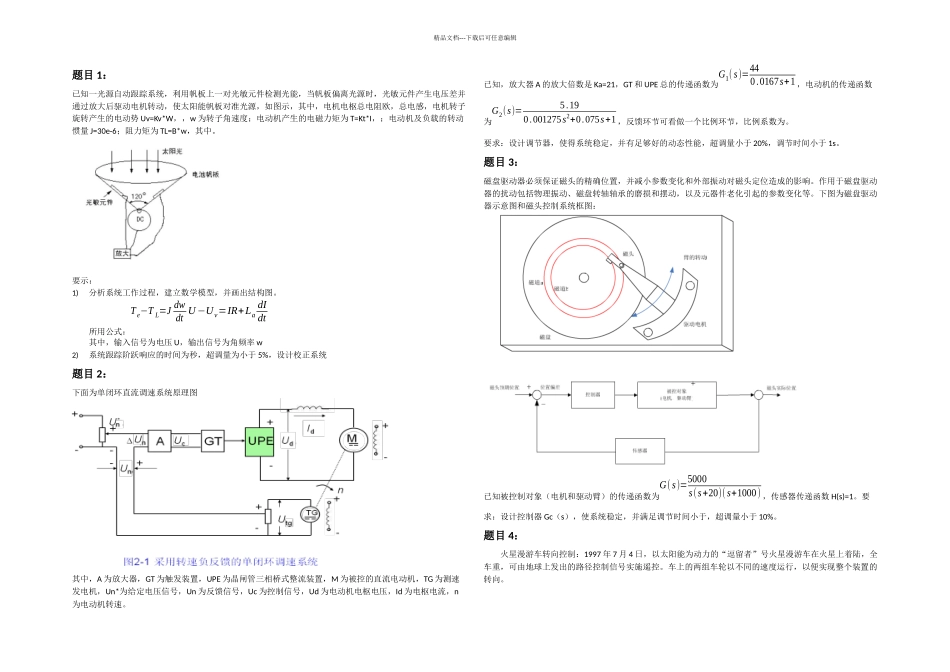
精品文档---下载后可任意编辑题目 1:已知一光源自动跟踪系统,利用帆板上一对光敏元件检测光能,当帆板偏离光源时,光敏元件产生电压差并通过放大后驱动电机转动,使太阳能帆板对准光源,如图示,其中,电机电枢总电阻欧,总电感,电机转子旋转产生的电动势 Uv=Kv*W,,w 为转子角速度;电动机产生的电磁力矩为 T=Kt*I,;电动机及负载的转动惯量 J=30e-6;阻力矩为 TL=B*w,其中
要示:1)分析系统工作过程,建立数学模型,并画出结构图
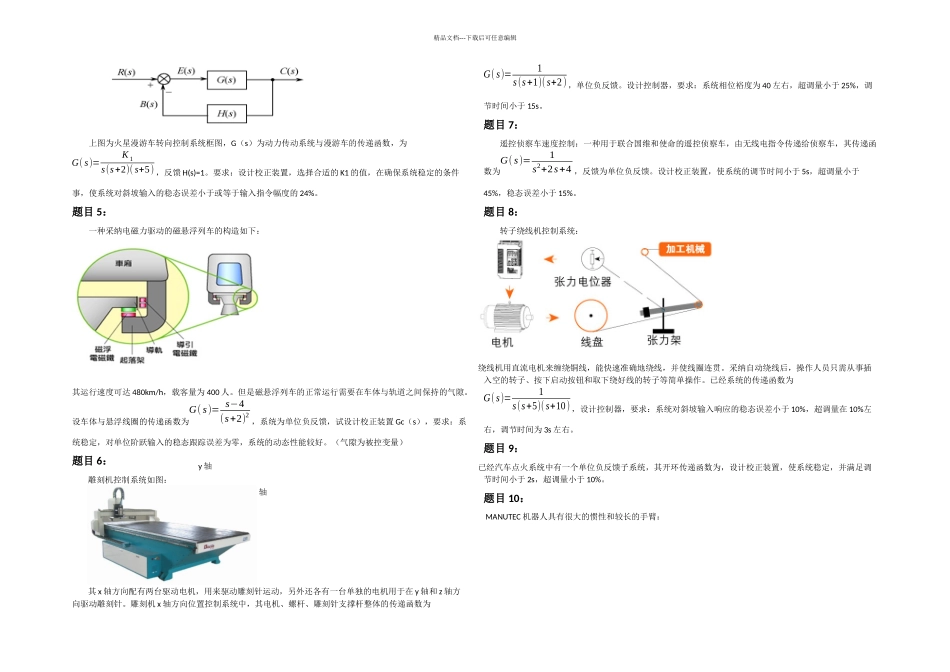
所用公式:T e−T L=J dwdt U −Uv=IR+LadIdt其中,输入信号为电压 U,输出信号为角频率 w2)系统跟踪阶跃响应的时间为秒,超调量为小于 5%,设计校正系统题目 2:下面为单闭环直流调速系统原理图其中,A 为放大器,GT 为触发装置,UPE 为晶闸管三相桥式整流装置,M 为被控的直流电动机,TG 为测速发电机,Un*为给定电压信号,Un 为反馈信号,Uc 为控制信号,Ud 为电动机电枢电压,Id 为电枢电流,n为电动机转速
已知,放大器 A 的放大倍数是 Ka=21,GT 和 UPE 总的传递函数为G1( s)=440
0167s+1 ,电动机的传递函数为G2(s)=5
001275s2+0
075s+1 ,反馈环节可看做一个比例环节,比例系数为
要求:设计调节器,使得系统稳定,并有足够好的动态性能,超调量小于 20%,调节时间小于 1s
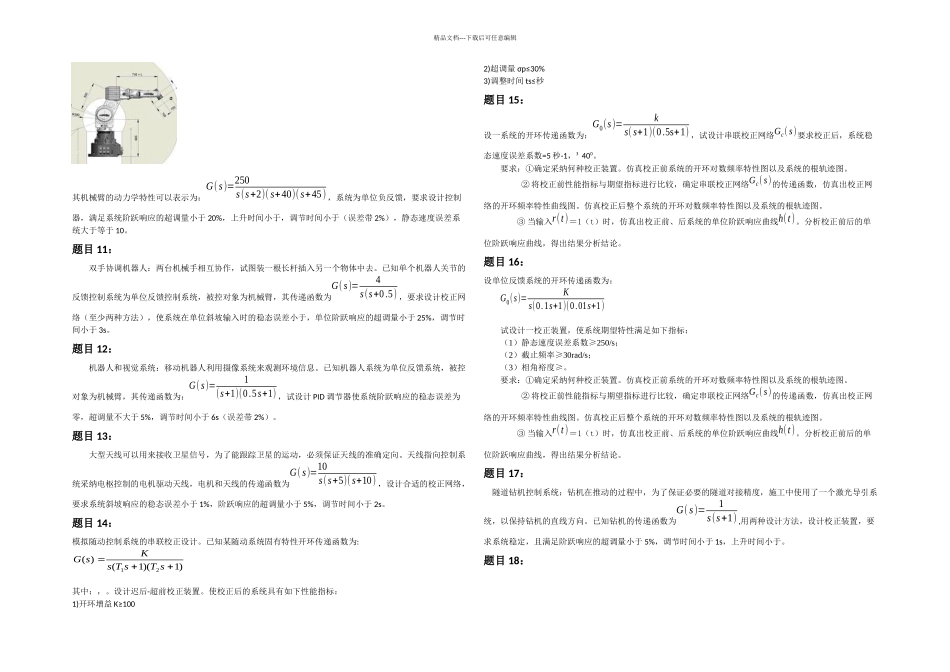
题目 3:磁盘驱动器必须保证磁头的精确位置,并减小参数变化和外部振动对磁头定位造成的影响
作用于磁盘驱动器的扰动包括物理振动、磁盘转轴轴承的磨损和摆动,以及元器件老化引起的参数变化等
下图为磁盘驱动器示意图和磁头控制系统框图:已知被控制对象(电机和驱动臂)的传递函数为G( s)=5000s(s+20)( s+1000) ,传感器传递函数 H(s)=1
要求:设计控制器