精品文档---下载后可任意编辑本科生课程设计书学 院 、系:机 电教学部 专 业:机械设计制造及自动化 学 生 姓 名:欧光宇班 级:机设 1402 学号 1412110211指 导 老 师 姓名:吴吉平最 终 评 定 成绩:2024-11-21 年 7 月 17 日目录一、 引言……………………………………………………(1)二、 设计要求………………………………………………(1)三、 设计的基本原理………………………………………(2)四、 机械手的动作流程……………………………………(4)五、 机械手液压系统电器控制的总体设计………………(7)六、 机械手液压系统 PLC 的设计………………………(10)七、 机械手电气元件的选择……………………………(16)1、 电动机的选择2、 三相隔离开关的选择3、 熔断器的选择4、 热继电器的选择5、 接触器的选择八、 小结…………………………………………………(18)九、 参考文献……………………………………………(18)十、 附图:系统电气原理图一、引言机械手是工业自动控制领域中常常遇到的一种控制对象
机械手通过模拟人的手臂的部分动作,按预定的程序、轨迹及其它要求,完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛
而可编程控制器(PLC)由于其具有的高可靠性、编程方便、易于使用和修改,易于扩展和维护,环境要求低、体积小巧,安装调试方便,在工业控制中有着广泛的应用
所以可以应用 PLC 控制机械手实现各种规定的工序动作,达到简化控制线路,节约成精品文档---下载后可任意编辑本,提高劳动生产率
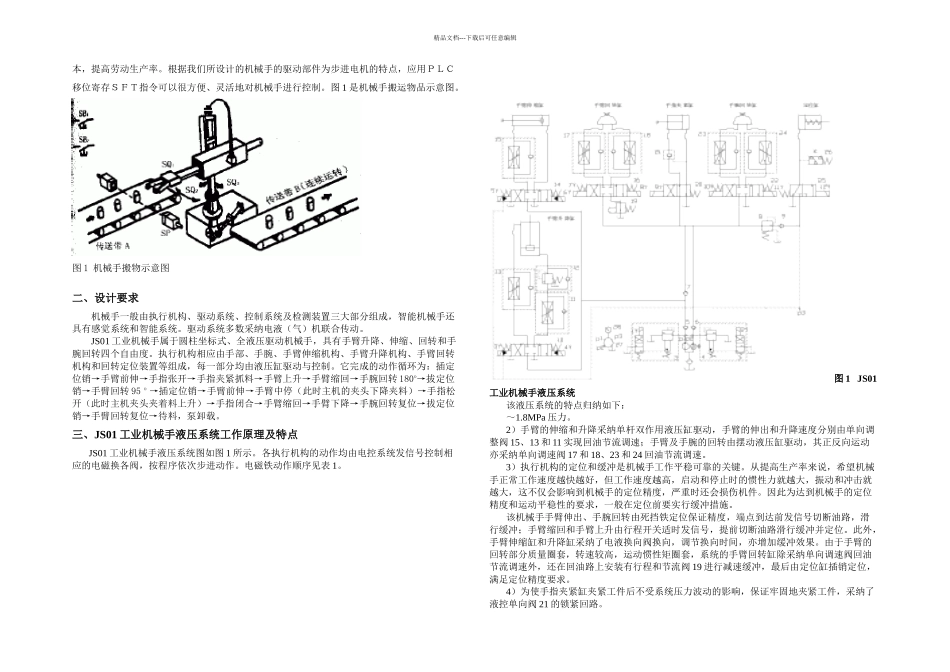
根据我们所设计的机械手的驱动部件为步进电机的特点,应用PLC移位寄存SFT指令可以很方便、灵活地对机械手进行控制
图 1 是机械手搬运物品示意图
图 1 机械手搬物示意图二、设计要求机械手一般由执行机构、驱动系统、控制系统及检测装置