精品文档---下载后可任意编辑一、 实验目的1
熟悉送料机构的组成,顺利安装2
熟悉机械手搬运机构的组成,顺利拆装和安装3
机械手抓取工件的原理4
整个搬运过程完成的自由度二、实验设备亚龙 YL-235A 型光机电一体化实训考核装置三、实验内容1
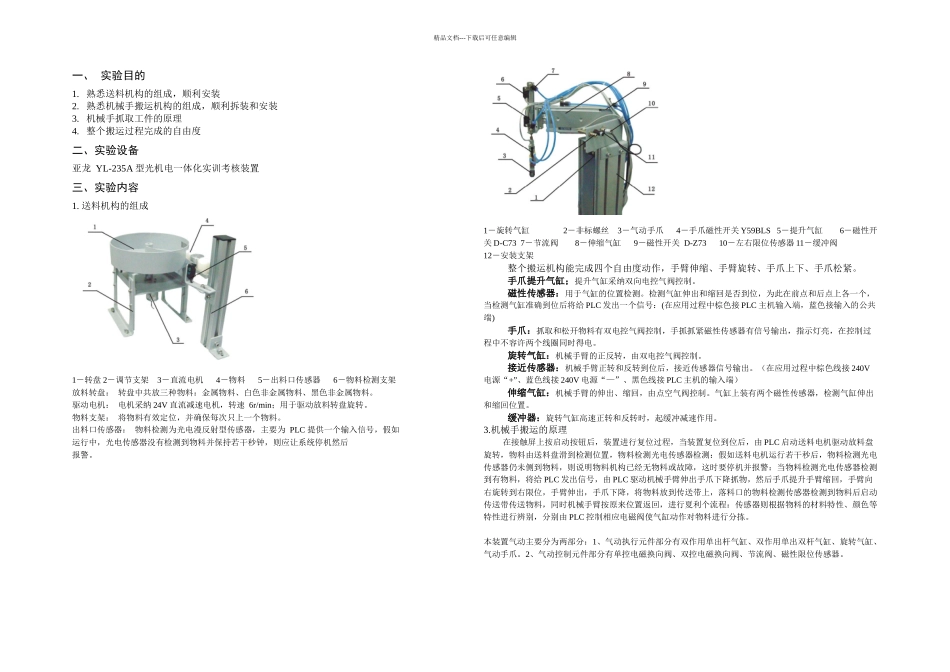
送料机构的组成1-转盘 2-调节支架 3-直流电机 4-物料 5-出料口传感器 6-物料检测支架放料转盘: 转盘中共放三种物料:金属物料、白色非金属物料、黑色非金属物料
驱动电机: 电机采纳 24V 直流减速电机,转速 6r/min;用于驱动放料转盘旋转
物料支架: 将物料有效定位,并确保每次只上一个物料
出料口传感器: 物料检测为光电漫反射型传感器,主要为 PLC 提供一个输入信号,假如运行中,光电传感器没有检测到物料并保持若干秒钟,则应让系统停机然后报警
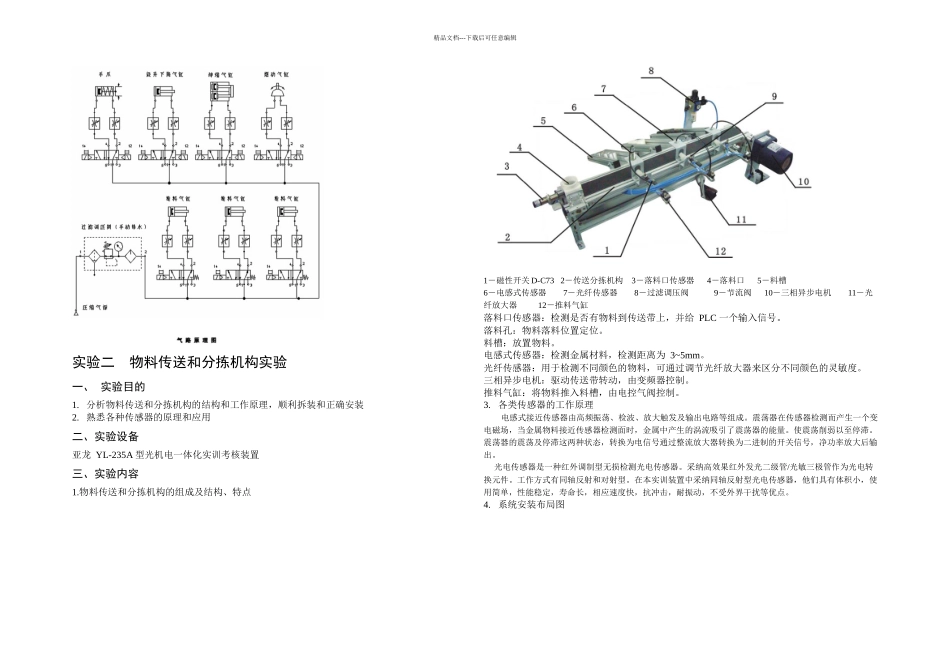
1-旋转气缸 2-非标螺丝 3-气动手爪 4-手爪磁性开关 Y59BLS 5-提升气缸 6-磁性开关 D-C73 7-节流阀 8-伸缩气缸 9-磁性开关 D-Z73 10-左右限位传感器 11-缓冲阀 12-安装支架整个搬运机构能完成四个自由度动作,手臂伸缩、手臂旋转、手爪上下、手爪松紧
手爪提升气缸;提升气缸采纳双向电控气阀控制
磁性传感器:用于气缸的位置检测
检测气缸伸出和缩回是否到位,为此在前点和后点上各一个,当检测气缸准确到位后将给 PLC 发出一个信号:(在应用过程中棕色接 PLC 主机输入端,蓝色接输入的公共端)手爪:抓取和松开物料有双电控气阀控制,手抓抓紧磁性传感器有信号输出,指示灯亮,在控制过程中不容许两个线圈同时得电
旋转气缸:机械手臂的正反转,由双电控气阀控制
接近传感器:机械手臂正转和反转到位后,接近传感器信号输出
(在应用过程中棕色线接 240V电源“+”、蓝色线接 240V 电源“—”、黑色线接 PLC 主机的输入端)伸缩气缸:机械手