精品文档---下载后可任意编辑1
系统论、 信息论 、 控制论 是机电一体化技术的理论基础,是机电一体化技术的方法论
机电一体化的概念已不再局限于某一具体产品的范围,而是扩大到 控制系统 和 被控制系统 相结合的产品制造和过程控制的大系统,如柔性制造系统、计算机集成制造系统及各种工业过程控制系统
根据不同的使用目的,要求机电一体化系统能对输入的物质、 能量 和 信息 (即工业三大要素)进行某种处理
机电一体化产品不仅是人的手与肢体的延伸,还是人的 感官 与 头脑 的延伸,具有“智能化”的特征是机电一体化与机械电气化在功能上的本质差别
要从 能量流 、 信息流 及物质流的视角去分析机电一体化共性关键技术
要从伺服控制系统稳、 准 、 快 的要求认识机电一体化共性关键技术
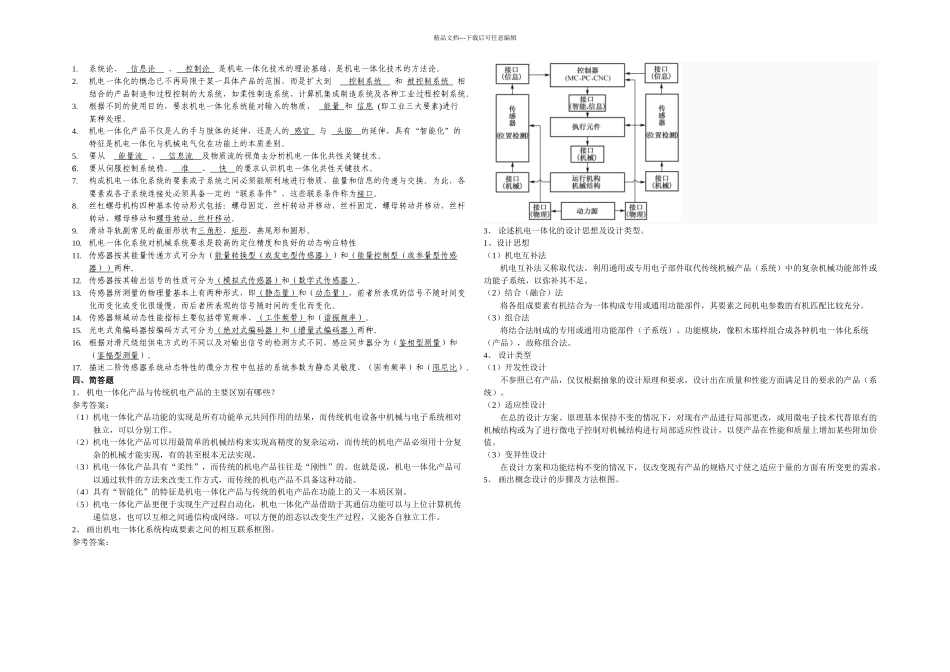
构成机电一体化系统的要素或子系统之间必须能顺利地进行物质、能量和信息的传递与交换
为此,各要素或各子系统连接处必须具备一定的“联系条件”,这些联系条件称为接口
丝杠螺母机构四种基本传动形式包括:螺母固定、丝杆转动并移动,丝杆固定、螺母转动并移动,丝杆转动、螺母移动和螺母转动、丝杆移动
滑动导轨副常见的截面形状有三角形、矩形、燕尾形和圆形
机电一体化系统对机械系统要求是较高的定位精度和良好的动态响应特性11
传感器按其能量传递方式可分为(能量转换型(或发电型传感器))和(能量控制型(或参量型传感器))两种
传感器按其输出信号的性质可分为(模拟式传感器)和(数学式传感器)
传感器所测量的物理量基本上有两种形式,即(静态量)和(动态量),前者所表现的信号不随时间变化而变化或变化很缓慢,而后者所表现的信号随时间的变化而变化
传感器频域动态性能指标主要包括带宽频率、(工作频带)和(谐振频率)
光电式角编码器按编码方式可分为(绝对式编码器)和(增量式编码器)两