精品文档---下载后可任意编辑1
1 引言 步进电动机一般以开环运行方式工作在伺服运动系统中,它以脉冲信号进行控制,将脉冲电信号变换为相应的角位移或线位移 步进电动机可以实现信号的变换。,是自动控制系统和数字控制系统中广泛应用的执行元件 由于其控制系统结构简单。,控制容易并且无累积误差,因而在 20 世纪 70 年代盛行一时。80 年代之后,随着高性能永磁材料的进展 计算机技术以及电力电子技术的进展、,矢量控制技术等一些先进的控制方法得以实现,使得永磁同步电机性能有了质的飞跃,在高性能的伺服系统中逐渐处于统治地位 相应的。,步进电机的缺点越来越明显,比如,其定位精度有限 低频运行时振荡 存在失、、步等,因而只能运用在对速度和精度要求不高,且对成本敏感的领域。技术进步给步进电动机带来挑战的同时,也带来了新的进展遇 由于电力电子技术及计算机技术。的进步,步进电动机的细分驱动得以实现 细分驱动技术是 。70 年代中期进展起来的一种可以显著改善步进电机综合性能的驱动控制技术 实践证明。,步进电机脉冲细分驱动技术可以减小步进电动机的步距角,提高电机运行的平稳性,增加控制的灵活性等 由于电机制造技术的进展。,德国百格拉公司于 1973 年发明了五相混合式步进电动机,又于 1993 年开发了三相混合式步进电动机 根据混合式步进。电动机的结构特点,可以将沟通伺服控制方法引入到混合式步进电机控制系统中,使其可以以任意步距角运行,并且可以显著削弱步进电机的一些缺点 若引入位置反馈。,则混合式步进电机控题正是借鉴了永磁沟通伺服系统的控制方法,研制了基于 DSP 的三相混合式步进电机驱动器。1
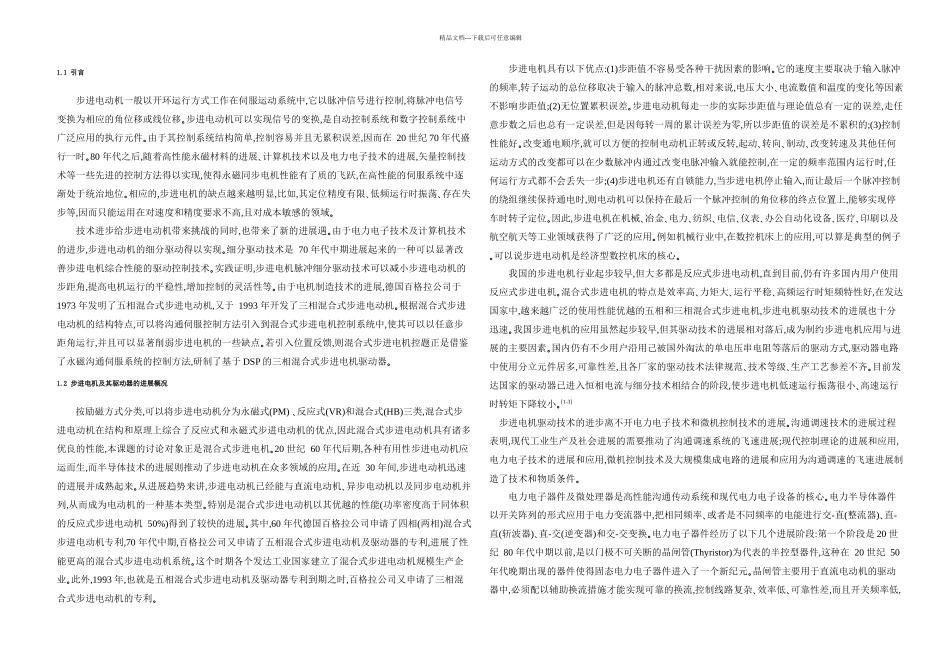
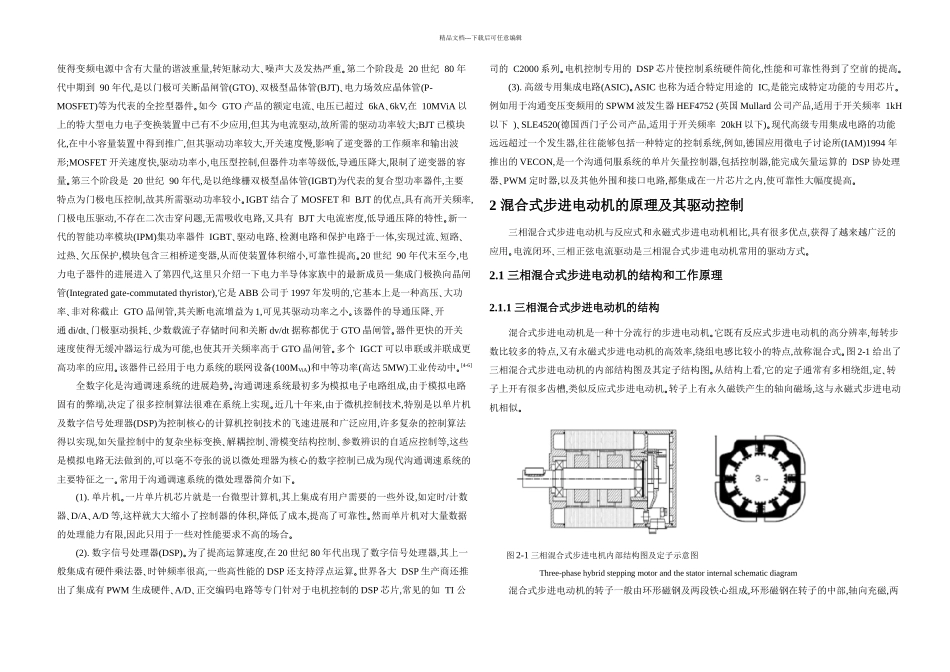
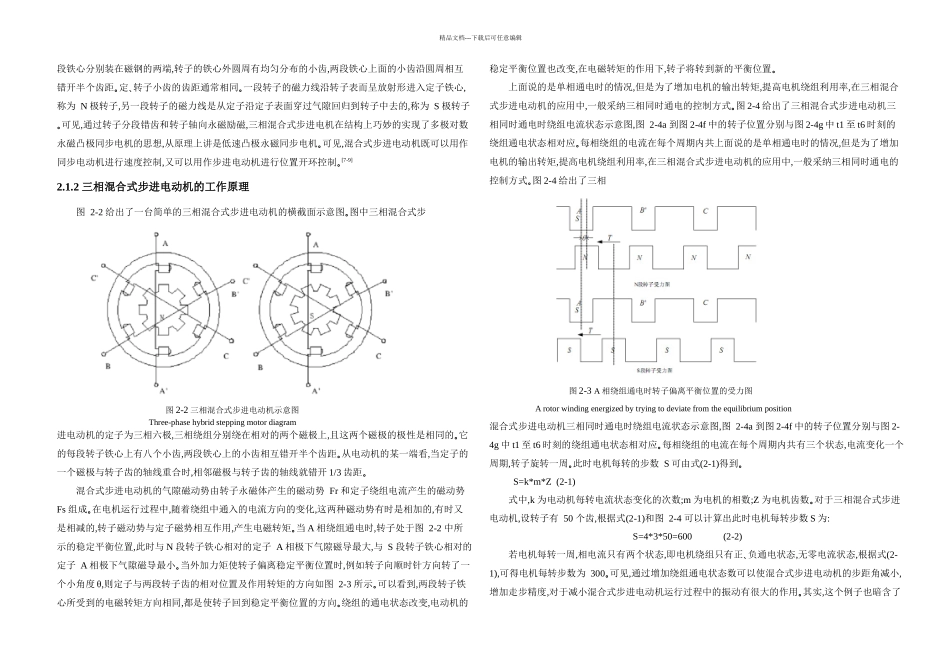
2 步进电机及其驱动器的进展概况按励磁方式分类,可以将步进电动机分为永磁式(PM) 反应式、(VR)和混合式(HB)三类,混合式步进电动机在结构和原理上综合了反应式和永磁式步进电动机的优点,因此混合式步进电