实验七 直线一级倒立摆系统根轨迹校正和仿真 一、实验目的 (1)了解直线倒立摆系统的组成以及系统建模的过程; (2)学习根轨迹法设计控制器的原理和方法; (3)学习用 MATLAB&SIMULINK 对倒立摆系统建立模型的方法,并仿真实现; (4)学习用 MATLAB 实现倒立摆控制器的设计,并仿真实现; (5)了解根轨迹校正实时控制方法和过程
二、实验设备 (1)直线倒立摆实验装置 (2)电控箱 (3)GT-400-SV-PCI运动控制卡 (4)计算机 (5)软件要求:Matlab6
5 以上版本软件,VC++6
0 软件,板卡自带 Dev ice Manager,倒立摆实时控制软件
三、实验原理 3
1 倒立摆系统组成 (见附录 4 ) 3
2 倒立摆系统模型 (见附录 4 ) 3
3 根轨迹分析 闭环系统瞬态响应的基本特性与闭环极点的位置紧密相关,如果系统具有可变的环路增益,则闭环极点的位置取决于所选择的环路增益,从设计的观点来看,对于有些系统,通过简单的增益调节就可以将闭环极点移到需要的位置,如果只调节增益不能满足所需要的性能时,就需要设计校正器,常见的校正器有超前校正、滞后校正以及超前滞后校正等
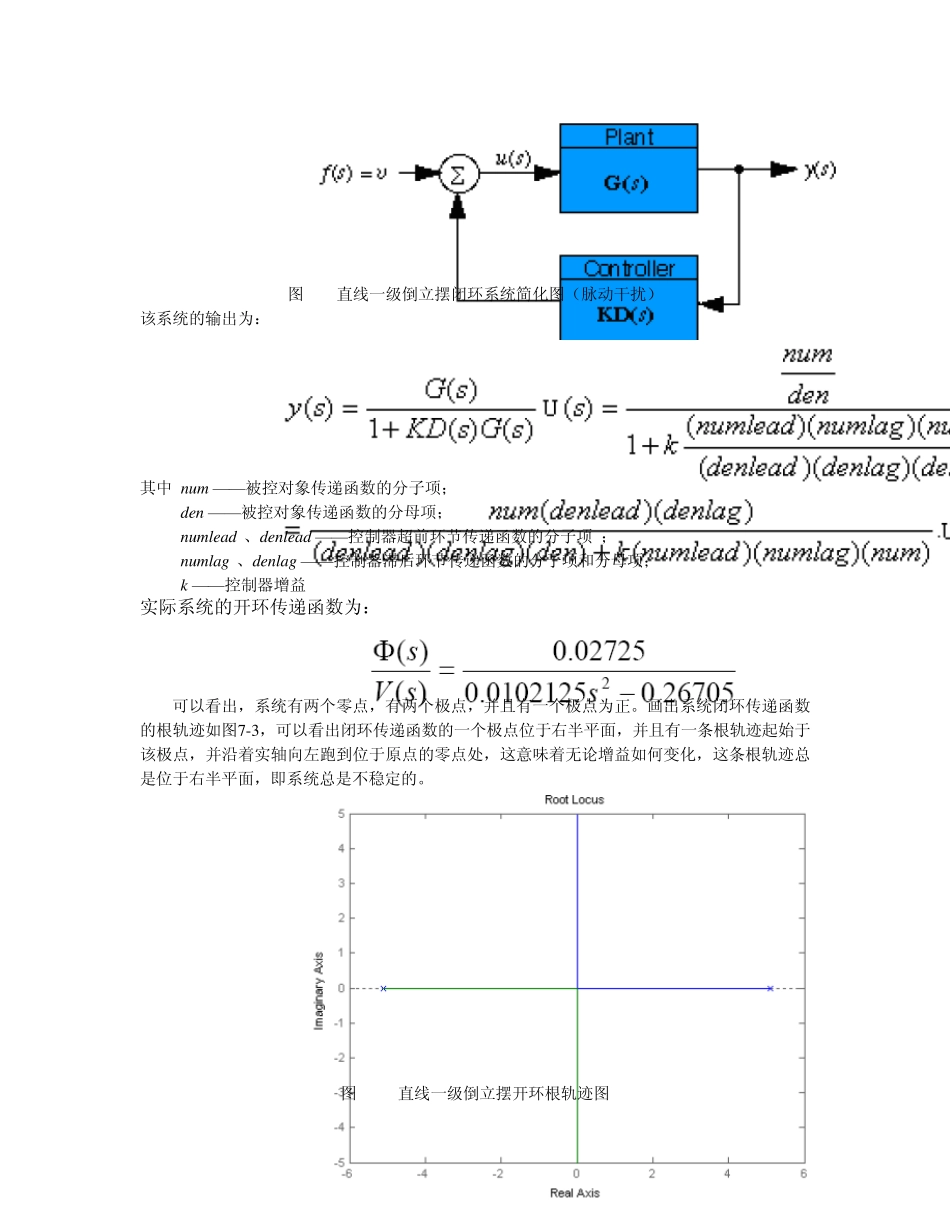
根据附录中公式(15)得到倒立舞者开环传递函数,输入为小车的加速度,输出为倒立摆系统摆杆的角度,被控对象的传递函数为: 给系统施加脉冲扰动,输出量为摆杆的角度时,系统框图如下: 图7-1 直线一级倒立摆闭环系统图(脉动干扰) 考虑到输入r(s) = 0,结构图变换成: 图7-2 直线一级倒立摆闭环系统简化图(脉动干扰) 该系统的输出为: 其中 num ——被控对象传递函数的分子项; den ——被控对象传递函数的分母项; numlead 、denlead ——控制器超前环节传递函数的分子项 ; numlag 、denlag ——控制器滞后环节传递函数的分子项和