目 录前 言 一、 XZ-IIA 旋转式倒立摆概述1.1 系统总体结构1.2 机械结构1.3 硬件部分1.4 软件部分二、 XZ-IIA 旋转式倒立摆的系...
摘 要倒立摆系统是典型的不稳定系统,因其具有多变量、强耦合、非线性和快速运动的绝对等特征,倒立摆系统在新型控制理论和方法的效性检验...

课程设计指导老师评定成绩表项目分值优秀(100〉x≥90)良好(90〉x≥80)中等(80〉x≥70)及格(70〉x≥60)不及格(x<60)评分参考标准参...
广 西 大 学 实 验 报 告实验内容:一阶倒立摆含观测器的状态反馈控制系统综合与设计 张凯强 (0902100202) 、毛世博(0902100110...

课 程 设 计 说 明 书课 程 名 称 : 控 制 系 统 课 程 设 计 设 计 题 目 : 一 阶 倒 立 摆 控 制 器 ...

一级直线倒立摆系统模糊控制器设计实验指导书目 录1 实验要求。。...。.。..。...。...。...。。.。..。....。...。..。.。.。.。。。.....

基于双闭环 PID 控制的一阶倒立摆控制系统设计一、设计目的 倒立摆是一个非线性、不稳定系统,常常作为讨论比较不同控制方法的典型例子...
摘要:为实现多输入、多输出、高度非线不稳定得倒立摆系统平衡稳定控制 ,将倒立摆系统得非线性模型进行近似线性化处理,获得系统在平衡点附...
TAIYUAN UNIVERSITY OF SCIENCE & TECHNOLOGY题 目: 院 (系): 专 业: 学生姓名: 学 号: 模 糊 控 制 在 倒 立...
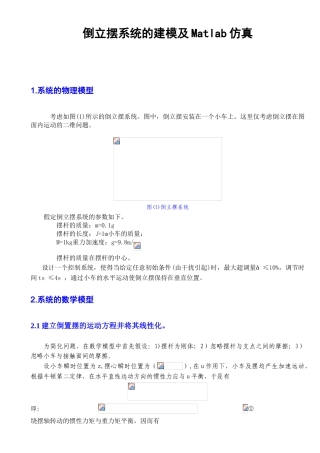
倒立摆系统的建模及 Matlab 仿真1.系统的物理模型 考虑如图(1)所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图...
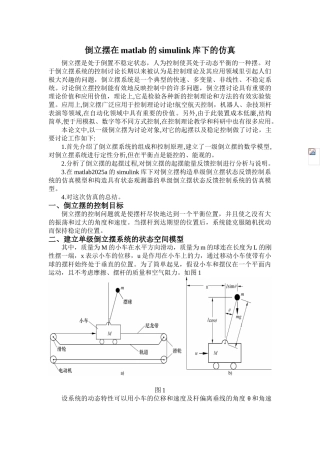
倒立摆在 matlab 的 simulink 库下的仿真倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆。对于倒立摆系统的控制讨论长...
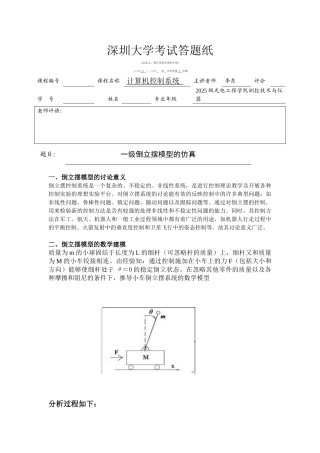
深圳大学考试答题纸(以论文、报告等形式考核专用)二○○ 九 ~二○○ 一零 学年度第 2 学期课程编号课程名称计算机控制系统 主讲老...

最优控制实验报告二零一五年一月目录第 1 章 一级倒立摆实验ﻩ31 、 1 一级倒立摆动力学建模 ﻩ Error: Reference source not ...
模糊控制 课程设计报告题 目: 基于 matlab 的倒立摆模糊控制 专业、班级: 09 级电气四班 学生姓名: 学 号: 指导老师: 分...
体育课《肩肘倒立》的课时教学计划设计说明一、教材内容。1、技巧:肩肘倒立(水平三)2、游戏:舞龙二、教学设计意图。本课教学设计首先考...
肩肘倒立模拟课堂教学各位评委(老师),今日我模拟上课得内容就就是水平三小学五年级《技巧:肩肘倒立》,本课就就是肩肘倒立教学单元得第一...
如何练瑜伽的手倒立 如何练〔瑜伽〕的手倒立?以下是练瑜伽的手倒立的方法等等的介绍,希望可以帮助到您。 练瑜伽的手倒立的方法一 学习...

倒立摆实验报告机自 82 组员:李宗泽 李航 刘凯 付荣倒立摆与自动控制原理实验一. 实验目得:1、运用经典控制理论控制直线一级倒立摆...
专 业 实 验 报 告学生姓名学号指导老师试验名称倒立摆与自动控制原理试验试验时间7 月 5 日一、试验内容(1)完毕.直线倒立摆建模...

现代控制理论试验汇报——倒立摆小组组员:指导老师:2025.5试验一 建立一级倒立摆旳数学模型一、 试验目旳学习建立一级倒立摆系统旳数学...